


При исследовании случая движения автомобиля А и автомобиля Б с различными скоростями следует определить последовательно положения обоих автомобилей и пешехода в различные моменты времени до нахождения такого положения, при котором автомобиль Б уже не мешал водителю автомобиля А видеть пешехода. Исследование лучше начинать с определения расчетным путем положения автомобиля А в тот момент, когда пешеход заканчивал пересечение полосы движения автомобиля Б. При этом отпадает необходимость проводить дополнительные расчеты, чтобы определить попадает или нет при указанных исходных данных пешеход под автомобиль Б.
После нанесения положений автомобиля А и автомобиля Б на схему, составленную в масштабе, методом подбора находится такое положение, по которому устанавливается граница видимости или «невидимой зоны».
Искомое положение подбирается путем нанесения положений автомобиля А, автомобиля Б и пешехода через равноценные отрезки пути, проходимые, например, за 1с, 0,5с и т. д.
Пример. Передней частью автомобиля ГАЗ-24 «Волга» был сбит пешеход, перебегавший проезжую часть справа налево под прямым углом и разделительному газону. Место наезда расположено в 7м от правой границы проезжей части. Пешеход двигался со скоростью ![]() =5 км/ч и появился из-за передней части автомобиля ГАЗ-51, двигавшегося со скоростью
=5 км/ч и появился из-за передней части автомобиля ГАЗ-51, двигавшегося со скоростью ![]() =50 км/ч справа от автомобиля ГАЗ-24 «Волга» с боковым интервалом в 1м. Автомобиль ГАЗ-24 «Волга» двигался со скоростью
=50 км/ч справа от автомобиля ГАЗ-24 «Волга» с боковым интервалом в 1м. Автомобиль ГАЗ-24 «Волга» двигался со скоростью ![]() =60 км/ч в 2м от разделительного газона. Водитель автомобиля ГАЗ-24 «Волга» перед наездом применил торможение, после наезда автомобиль в заторможенном состоянии до остановки переместился на
=60 км/ч в 2м от разделительного газона. Водитель автомобиля ГАЗ-24 «Волга» перед наездом применил торможение, после наезда автомобиль в заторможенном состоянии до остановки переместился на ![]() =15м. водитель автомобиля ГАЗ-51 при приближении к линии движения пешехода торможения и маневра не применял. Пешеход закончил пересечение полосы движения автомобиля ГАЗ-51 в
=15м. водитель автомобиля ГАЗ-51 при приближении к линии движения пешехода торможения и маневра не применял. Пешеход закончил пересечение полосы движения автомобиля ГАЗ-51 в![]() =3м перед его передней частью. Проезжая часть сухая, асфальтированная, горизонтального профиля, шириной для движения в одном направлении 10м.
=3м перед его передней частью. Проезжая часть сухая, асфальтированная, горизонтального профиля, шириной для движения в одном направлении 10м.
![]() =0,8 с;
=0,8 с; ![]() =0,1 с;
=0,1 с; ![]() =0,2 с;
=0,2 с; ![]() =1,1;
=1,1;![]() =0,7.
=0,7.
Автомобиль ГАЗ-24 технически исправлен, нагрузка – четыре пассажира.
Определить, имел ли водитель автомобиля ГАЗ-24 «Волга» техническую возможность предотвратить наезд путем торможения с момента, когда автомобиль ГАЗ-51 уже не ограничивал возможности видимости пешехода.
Решение. На схему (рис.7.11) наносят в выбранном масштабе траекторию движения пешехода и положение автомобиля ГАЗ-51, соответствующее моменту окончания пересечения пешеходом полосы движения этого автомобиля. После этого находят перемещение ![]() пешехода от полосы движения автомобиля ГАЗ-51 до места наезда. В данном случае это перемещение равно 1,8м. затем определяют удаление автомобиля ГАЗ-24 «Волга» от места наезда и момент окончания пересечения пешеходом полосы движения автомобиля ГАЗ-51 (по формуле 7.30)
пешехода от полосы движения автомобиля ГАЗ-51 до места наезда. В данном случае это перемещение равно 1,8м. затем определяют удаление автомобиля ГАЗ-24 «Волга» от места наезда и момент окончания пересечения пешеходом полосы движения автомобиля ГАЗ-51 (по формуле 7.30)
|
 -
- ≈21 м.
≈21 м.Остановочный путь автомобиля ГАЗ-24 «Волга»
![]() =(
=(![]() +
+![]() +0,5
+0,5![]() )
)![]() +
+ =(0,8+0,1+0,5∙0,2)
=(0,8+0,1+0,5∙0,2)![]() +
+
![]() 39 м.
39 м.
Исходя из![]() ≈21 м (положение 1 на схеме) определяются положения автомобиля ГАЗ-51 и пешехода в момент удаления автомобиля ГАЗ-24 «Волга» от места наезда на
≈21 м (положение 1 на схеме) определяются положения автомобиля ГАЗ-51 и пешехода в момент удаления автомобиля ГАЗ-24 «Волга» от места наезда на ![]() ≈39 м.
≈39 м.
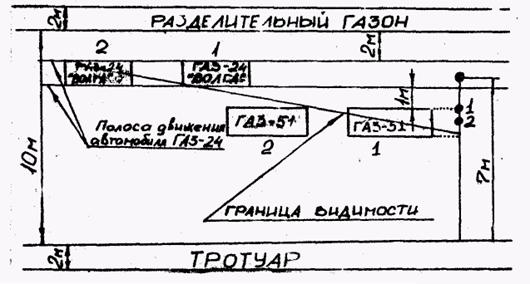
Рис. 7.11. Взаимное положение автомобиля и пешехода в схеме ДТП, связанного с наездом автомобиля ГАЗ-24 «Волга» на пешехода, вышедшего из-за автомобиля ГАЗ-51, двигавшегося в том же направлении в момент:
1 - Пересечения пешеходом полосы движения автомобиля ГАЗ-51;
2 - Нахождения автомобиля ГАЗ-24 «Волга» на расстоянии остановочного пути от места наезда.
Удаление автомобиля ГАЗ-51 от линии следования пешехода
|
 =
= ≈ 18 м.
≈ 18 м.Удаление пешехода от места наезда
|
 =
= ≈ 3,3 м.
≈ 3,3 м.После этого на схему наносят положение автомобиля ГАЗ-24 «Волга» на расстоянии остановочного пути от места наезда, соответствующие положения автомобиля ГАЗ-51, пешехода (положение 2 на схеме) и определяют границу видимости. Она проходит через точку, соответствующую положению водителя и автомобиля ГАЗ-24 «Волга», и левый передний угол автомобиля ГАЗ-51. Согласно построенной схеме автомобиль ГАЗ-51 не ограничивал видимости пешехода водителю автомобиля ГАЗ-24 «Волга», в тот момент, когда последний находился от места наезда на расстоянии ![]() ≈39м.
≈39м.
Следовательно, водитель автомобиля ГАЗ-24 «Волга» имел техническую возможность предотвратить наезд путем торможения с момента, когда автомобиль ГАЗ-51, двигавшийся справа, уже не ограничивал возможности видимости пешехода.
Для решения вопроса о возможности предотвращения наезда на пешехода аналитическим методом необходимы дополнительные исходные данные (рис. 7.12):
- расстояние от линии движения пешехода до автомобиля-препятствия в момент, когда пешеход закончил пересечение полосы движения последнего;
- расстояние от боковой поверхности автомобиля до точки передней части, которой был сбит пешеход;
- боковой интервал между автомобилем, ограничившим обзорность, и пешеходом в момент, когда последний покинул полосу движения этого автомобиля.
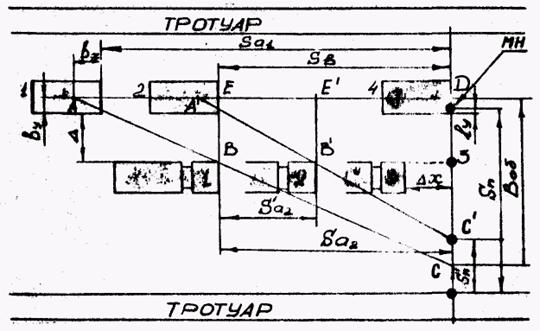
Рис. 7.12. Взаимное положение автомобилей и пешехода в схеме ДТП,
связанного с наездом автомобиля на пешехода, вышедшего из-за автомобиля,
в момент:
1- выхода пешехода на проезжую часть;
2- появление пешехода в поле зрения водителя;
3- выхода пешехода с полосы движения автомобиля, ограничивающего обзорность;
4- наезда на пешехода.
Принимается также, что пешеход вышел из-за передней части автомобиля Б до наезда как автомобиль, так и пешеход двигались равномерно. Наезд на пешехода произошел без торможения автомобилей.
Для решения вопроса о том, была ли у водителя возможность видеть пешехода, начинавшего движение по проезжей части, необходимо определить ширину зоны обзорности ![]() на уровне линии соединения пешехода. Из подобия треугольников АВЕ и АСД следует
на уровне линии соединения пешехода. Из подобия треугольников АВЕ и АСД следует
| (7.58) |
 =
= ,
,где ![]() - удаление автомобиля А от места наезда в момент начала движения пешехода по проезжей части:
- удаление автомобиля А от места наезда в момент начала движения пешехода по проезжей части:
|
![]() - удаление автомобиля Б от линии движения в этот же момент:
- удаление автомобиля Б от линии движения в этот же момент:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 |
