


После этого в масштабе следует нанести размеры проезжей части с указанием ее границ, положение места наезда, неподвижного препятствия, полосу движения автомобиля, траекторию движения пешехода. В качестве примера на рис. 7.9 показана схема, на которой пешеход движется под прямым углом к осевой линии, автобус ЛиАЗ-677 стоит вплотную к тротуару, а автомобиль ГАЗ-24 «Волга» движется прямолинейно.
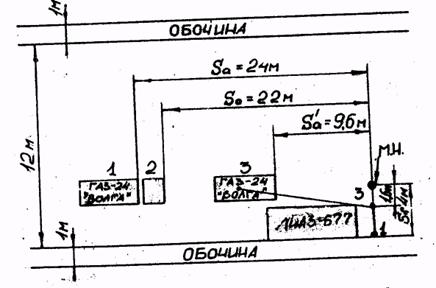
Рис. 7.9 Схема ДТП, связанного с наездом автомобиля ГАЗ-24 «Волга» на пешехода, вышедшего из=за автобуса ЛиАЗ-677:
1- Положение автомобиля ГАЗ-24 «Волга» и пешехода в момент начала движения последнего по проезжей части;
2- Положение автомобиля ГАЗ-24 «Волга» на расстоянии остановочного пути от места наезда;
3- Положение автомобиля ГАЗ-24 «Волга» и пешехода в момент появления последнего в поле зрения водителя.
После нанесения на схему положения автомобиля ГАЗ-24 «Волга», соответствующего положению пешехода в начальный момент, надо провести прямую АВ от рабочего места водителя ТС через угол объекта, ограничивающего обзорность, и по точке С пересечения ее с линией следования пешехода установить, попадал ли пешеход в поле зрения водителя с его рабочего места. Для расчетов примем следующие данные:
![]() =4 м;
=4 м; ![]() =6,6 км/ч;
=6,6 км/ч; ![]() =40км/ч;
=40км/ч; ![]() =0,8 с;
=0,8 с; ![]() =0,1 с;
=0,1 с; ![]() =0,2 с;
=0,2 с; ![]() =1,2;
=1,2;![]() =0,7.
=0,7.
Положение автомобиля определим исходя из расчетного удаления, которое составит
|
Остановочный путь автомобиля ГАЗ-24 «Волга»
![]() =(
=(![]() +
+![]() +0,5
+0,5![]() )
)![]() +
+ =(0,8+0,3+0,5∙0,2)
=(0,8+0,3+0,5∙0,2)![]() +
+
![]() 22 м.
22 м.
Согласно прилагаемой схеме, построенной с учетом подсчитанных величин ![]() и
и![]() (см. рис.7.9), в момент начала движения по проезжей части пешеход не был виден водителю. Поэтому нужно, постепенно сближая автомобиль и пешехода, на схеме методом подбора установить положение, при котором автобус ЛиАЗ-677 не ограничивал видимости пешехода. Подбирать нужное положение автомобиля и пешехода можно по расстояниям, проходимым ими за одинаковые промежутки времени, например за 1с.
(см. рис.7.9), в момент начала движения по проезжей части пешеход не был виден водителю. Поэтому нужно, постепенно сближая автомобиль и пешехода, на схеме методом подбора установить положение, при котором автобус ЛиАЗ-677 не ограничивал видимости пешехода. Подбирать нужное положение автомобиля и пешехода можно по расстояниям, проходимым ими за одинаковые промежутки времени, например за 1с.
После этого следует решить вопрос о том, мог ли с этого момента водитель автомобиля предотвратить наезд путем торможения. Для этого остановочный путь автомобиля сравнивается с удалением его от места наезда в момент, когда препятствие уже не ограничивало видимости пешехода. Если в этом случае удаление больше остановочного пути, делается вывод, что водитель имел техническую возможность предотвратить наезд путем торможения; если удаление меньше остановочного пути, делается противоположный вывод.
Возможен и другой способ решения. Для этого сначала расчетным путем нужно определить остановочный путь автомобиля и удаление пешехода от места наезда в момент, когда автомобиль находился на расстоянии остановочного пути от места наезда. Эти положения автомобиля и пешехода наносят на схему видимости и по ней определяют, ограничивало ли в этом положении препятствие возможность видимости пешехода с рабочего места водителя. При ограниченной обзорности водитель не мог избежать происшествия. Однако последний метод применим лишь в том случае, если следствием (судом) не поставлен вопрос о том, где находился автомобиль и пешеход в момент, когда препятствие уже не ограничивало возможности видимости последнего.
Данный вопрос может быть решен и аналитическим путем без построения схемы. Из подобия треугольников АВЕ и ВСД (рис.7.10) получаем
| (7.46) |
 =
= ,
,где ![]() - интервал между автомобилем и препятствием;
- интервал между автомобилем и препятствием;
![]() - расстояние между пешеходом и препятствием;
- расстояние между пешеходом и препятствием;
![]() ,
,![]() - координаты рабочего места водителя;
- координаты рабочего места водителя;
![]() - расстояние видимости пешехода;
- расстояние видимости пешехода;
![]() - путь пешехода в поле зрения водителя до момента наезда.
- путь пешехода в поле зрения водителя до момента наезда.
Следовательно,
| (7.47) |
 ∙
∙В последнем уравнении содержится два неизвестных - ![]() и
и ![]() . Поэтому составим еще одно уравнение исходя из условия равенства времени движения автомобиля и пешехода до наезда, т. е.
. Поэтому составим еще одно уравнение исходя из условия равенства времени движения автомобиля и пешехода до наезда, т. е. ![]() =
=![]() .
.
| (7.48) |
 =
=где ![]() - расстояние от заднего моста до места на боковой поверхности, которым был нанесен удар пешеходу;
- расстояние от заднего моста до места на боковой поверхности, которым был нанесен удар пешеходу;
![]() - расстояние от передней части автомобиля до оси задних колес.
- расстояние от передней части автомобиля до оси задних колес.
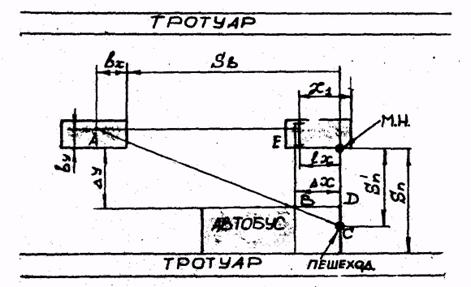
Рис. 7.10. схема ДТП, связанного с наездом автомобиля на пешехода,
вышедшего из-за стоящего ТС.
Откуда получаем
| (7.49) |
Приравняв правые части выражений (7.47)и (7.49), получим уравнение с одним неизвестным ![]()
| (7.50) |
Освободившись от знаменателя и сгруппировав подобные члены, приведем выражение (7.50) к следующему виду:
| (7.51) |
С - коэффициенты, зависящие от параметров, входящих в уравнение.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 |
