


назначения элементов
Буквенный код | Функциональное назначение | Буквенный код | Функциональное назначение |
А | Вспомогательный | N | Измерительный |
В | Направление движения (вперед, назад, вверх, вниз, по часовой стрелке, против часовой стрелки) | Р | Пропорциональный |
Q | Состояние (старт, стоп, ограничение) | ||
C | Считающий | R | Возврат, сброс |
D | Дифференцирующий | S | Запоминание, запись |
F | Защитный | Т | Синхронизация, задержка |
G | Испытательный | V | Скорость (ускорение, торможение) |
Н | Сигнальный | W | Сложение |
I | Интегрирующий | X | Умножение |
К | Толкающий | Y | Аналоговый |
M | Главный | Z | Цифровой |
4.2 ОБОЗНАЧЕНИЯ УСЛОВНЫЕ ГРАФИЧЕСКИЕ В СХЕМАХ
4.2.1 Катушки индуктивности, дроссели, трансформаторы,
автотрансформаторы и магнитные усилители
(ГОСТ 2.723 – 68)
Таблица 4.4 – Катушки индуктивности, дроссели, трансформаторы,
автотрансформаторы и магнитные усилители
Наименование | Обозначение | |
Форма I | Форма II | |
Катушка индуктивности, дроссель без магнитопровода |
| |
Реактор. Обозначение устанавливается для схем энергоснабжения |
| |
Катушка индуктивности с отводами Примечание. Количество полуокружностей в изображении не устанавливается |
| |
Катушка индуктивности со скользящими контактами (например, двумя) |
| |
Катушка индуктивности с магнитодиэлектрическим магнитопроводом |
| |
Катушка индуктивности, подстраиваемая магнитодиэлектрическим проводом |
| |
Катушка индуктивности, подстраиваемая немагнитным магнитопроводом, например, медным |
| |
Дроссель с ферромагнитным магнитопроводом |
| |
Дроссель коаксиальный с ферромагнитным магнитопроводом |
| |
Дроссель трехфазного тока с соединением обмоток в звезду |
|
|



4.2.2 Условные изображения магнитопроводов
(ГОСТ 2.416 – 68)
Настоящий стандарт устанавливает условные изображения магнитопроводов, набираемых из листов (шихтованных) и навиваемых из лент (витых), на чертежах изделий всех отраслей промышленности.
Шихтованные и витые магнитопроводы в поперечных разрезах и сечениях (относительно листов или лент) штрихуют, как показано на рисунке 4.1-а и - б.
Сечение в разрезе части магнитопровода штрихуют, как показано на рисунке 4.1-в и - г.
Витые магнитопроводы в продольных разрезах и сечениях (относительно лент) штрихуют, как показано на рисунках 4.1-д и 2
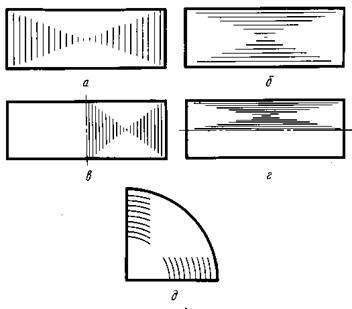
Рисунок 4.1 – Шихтованные и витые магнитопроводы в поперечных разрезах
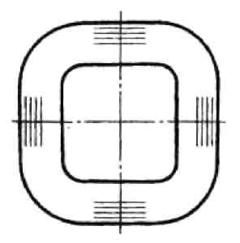
Рисунок 4.2 – Витой магнитопровод в продольном разрезе
Штриховку выполняют сплошными тонкими линиями. Расстояние между параллельными линиями штриховки (ее частота) должно быть одинаковым для всех выполняемых в одном и том же масштабе сечений данного предмета. Указанное расстояние выбирают в пределах 1...10 мм в зависимости от площади штриховки и необходимости разнообразить штриховку смежных сечений.
Линии штриховки (рисунок 4.1-a, -б, - в - г) ограничивают вспомогательными диагоналями, не показываемыми на чертеже.
Расположение вспомогательных диагоналей контура сложной конфигурации (рисунок 4.3) и длину линий штриховки при обозначении витых магнитопроводов (рисунок 4.1-д) не регламентируют. Длина линий штриховки должна быть примерно одинаковой.
Направление линий штриховки должно соответствовать расположению листов или витков ленты магнитопроводов.
Количество линий штриховки не зависит от количества листов (витков ленты) и от толщины листов (ленты) магнитопровода.
Магнитопроводы в разрезах и сечениях вдоль листов не штрихуют (разрез Б–Б на рисунке 4.4).
Магнитопроводы, имеющие значительную длину и изображаемые без разрыва или с разрывом, в поперечных разрезах и сечениях штрихуют по краям (рисунок 4.5).
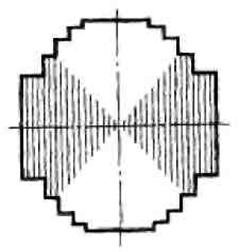
Рисунок 4.3 – Расположение вспомогательных диагоналей контура
сложной конфигурации
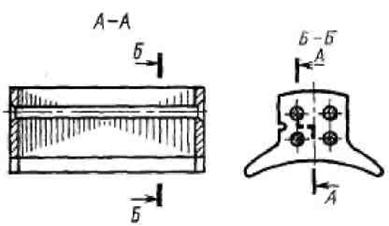
Рисунок 4.4 – Магнитопровод в разрезах
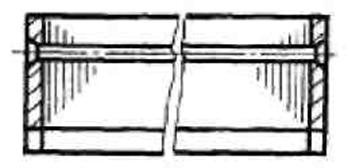
Рисунок 4.5 – Штриховка разрезанного магнитопровода по краям
В разрезах и сечениях магнитопроводов, набранных из нескольких частей (пакетов), штрихуют только крайние пакеты (рисунок 4.6).
При местном разрезе магнитопровод штрихуют также, как металл (рисунок 4.7).
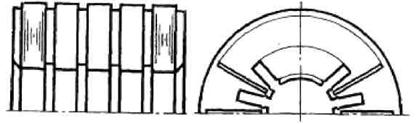
Рисунок 4.6 – Магнитопровод набранный из нескольких частей
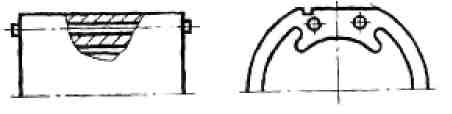
Рисунок 4.7 – Местный разрез магнитопровода
Разрезы (сечения) отдельных участков сердечника штрихуют, как показано на рисунке 4.8.
Если секущая плоскость проходит через ось магнитопровода, то независимо от угла наклона зуба магнитопровода, его условно совмещают с плоскостью чертежа и разрез (сечение) показывают по зубу (рисунок 4.9).
Магнитопроводы на видах показывают как монолитные тела (рисунок 4.10-а и 4.11-а).
При отсутствии разрезов магнитопроводов допускается на виде проводить несколько штриховых линий в направлении расположения листов (рисунок 4.10-б) или лент (рисунок 4.11-б).
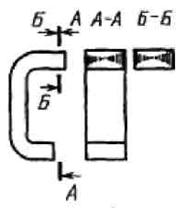
Рисунок 4.8 – Разрезы отдельных участков сердечника
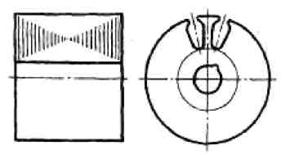
Рисунок 4.9 – Способ изображения зубцов
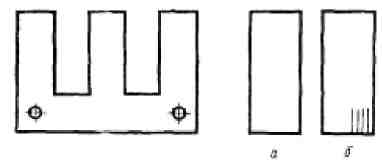
Рисунок 4.10 – Монолитные и листовые магнитопроводы
Пазы на видах якоря (ротора) и статора не изображают.
Если необходимо указать направление скоса пазов, то изображают один паз (рисунок 4.12).
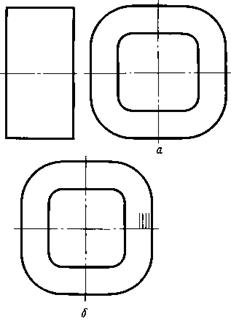
Рисунок 4.11 – Монолитные и листовые магнитопроводы
Рисунок 4.12 – Способ изображения одного паза
Величину скоса пазов оговаривают в технических требованиях
ПРИЛОЖЕНИЕ А
Пример расчета аппарата магнитной обработки воды
с использованием программного комплекса ELCUT
1 Методика расчета АМОВ
Метод конечных элементов применяется для решения любой задачи по определению двумерного поля. Решения, найденные методом конечных разностей, являются приближенными, однако, использование компьютерной техники и современных программ позволяет получить результаты с желаемой точностью.
Для расчета магнитной системы АМОВ будем использовать программный комплекс ELCUT (расчет двумерных полей методом конечных разностей). Данная программа разработана производственным кооперативом ТОР г. Санкт-Петербург. Программа позволяет решать плоские и осесимметричные задачи. Для решения магнитной системы необходима корректная постановка задачи [3].
Началом работы с программой является создание геометрической модели. Создание модели происходит в три этапа:
1) построение геометрического объекта;
2) задание свойств, источников поля и граничных условий;
3) построение сетки конечных элементов.
Для построения геометрического объекта необходимо построить ребра, а их соединение между собой приведет к созданию объекта.
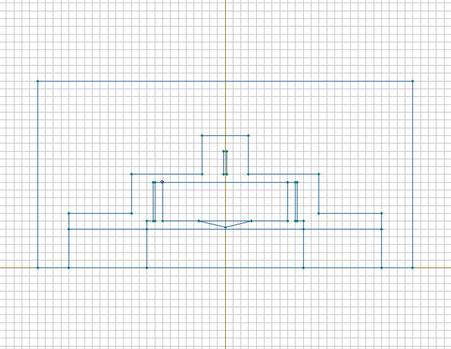
Рисунок 1.1 – Геометрия магнитной системы
аппарата для магнитной обработки воды
Следующий этап при решении поставленной задачи - это задание свойств объектов (блоков). Метка блоков описывает свойства материалов. После открытия свойств метки появится следующее окно.
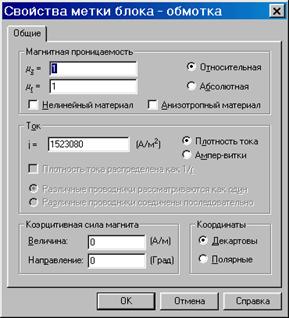
Рисунок 1.2 – Окно свойства метки блока
В свойствах метки блока, задаются два компонента:
- магнитная проницаемость;
- полный ток или плотность тока.
В ферромагнитных материалах необходимо задать кривую намагничивания вместо магнитной проницаемости [2].
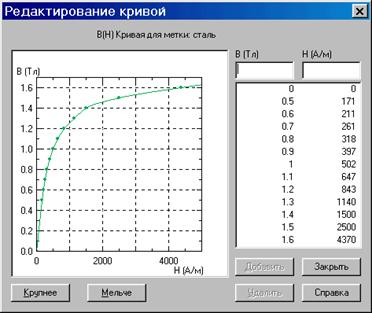
Рисунок 1.3 – Кривая намагничивания материала
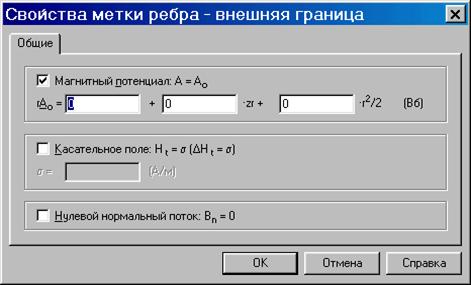
Рисунок 1.4 – Свойства метки ребра
Свойство метки ребра задается для одного из возможных граничных условий.
Условие Дирихле, задает на части границы известный векторный магнитный потенциал А0 в вершине или на ребре модели. Это граничное условие определяет поведение нормальной составляющей индукции на границе. В программе ELCUT условие Дирихле задается как функция координат в виде:
А0 = а + вх + су – для плоских задач.
rА0 = а + вzr + cr2 / 2 – для осесимметричных задач.
Константы а, в и с постоянны в пределах стороны, но могут меняться от одной части границы к другой.
После описания геометрии объекта необходимо построить, конечно-элементную, сетку. Густота сетки непосредственно влияет на точность решения в тех или иных частях расчетной области. Сетка делается особенно густой в местах, где необходимо получить большую точность. Густота сетки управляется заданием шагов дискретизации в вершинах. Шаг дискретизации определяет расстояние между соседними узлами сетки в окрестности, данной вершины.
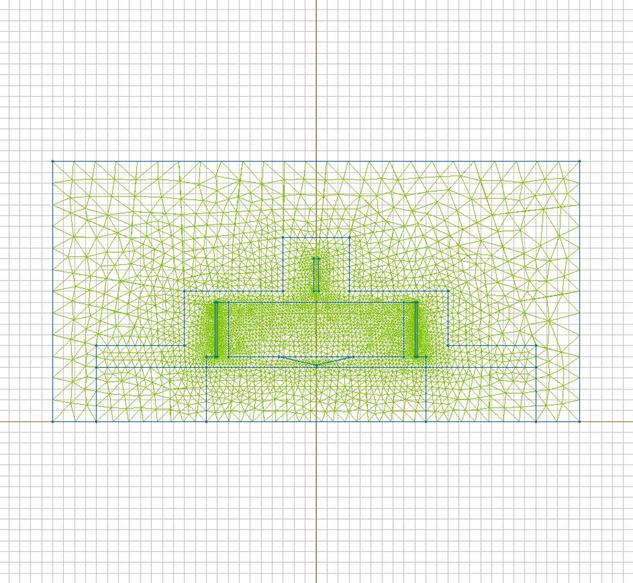
Рисунок 1.5 – Сетка конечных элементов
После корректной постановки задачи программа осуществляет расчет магнитной системы. Результатом расчета является картина магнитного поля.
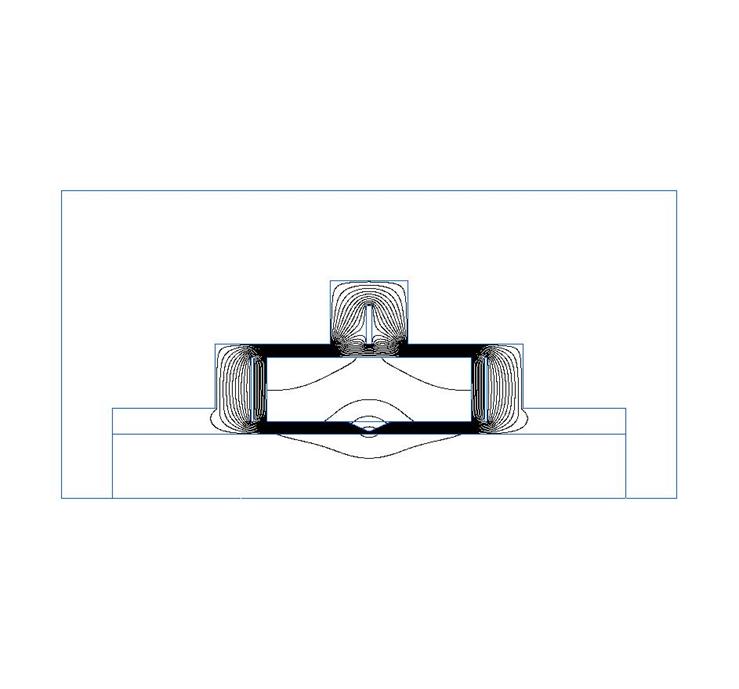
Рисунок 1.6 – Картина распределения силовых магнитных линий
аппарата магнитной обработки воды
2 Исследования по оптимизации магнитной системы
аппарата магнитной обработки воды
Конструирование, производство и эксплуатация аппаратов для магнитной обработки водных систем чрезвычайно затруднена тем, что отсутствуют научные основы этого процесса, доведенные до стадии инженерных расчетов, и не проводятся четкие сравнительные испытания различных аппаратов для изучения влияния их конструктивных элементов на процесс омагничивания. Создание и изготовление аппаратов производится на основе качественных представлений о механизме явлений, практики эксплуатации аппаратов в России и за рубежом, а иногда исходя из чисто интуитивных соображений.
При создании аппаратов учитывается необходимость разработки конструкций, которые, наряду с эффективным воздействием на водные системы, позволяют достигнуть высокого коэффициента использования магнитных источников, отличаются простотой и надежностью, по возможности, могут быть изготовлены из малодефицитных материалов и не создают больших потерь напора [19]. От размера последнего фактора, характеризующего степень гидродинамического совершенства аппарата, зависит его производительность.
Эффект от обработки воды магнитным полем, зависит от параметров аппарата и свойств воды: индукции; градиента напряженности в зазоре аппарата; скорости потока воды; времени воздействия магнитного поля; количества пересечений магнитного поля; концентрации солей; количества агрессивной двуокиси углерода.
При проектировании новых аппаратов необходимо производить их расчет на соответствие определенным критериям. Учет этих критериев позволит сократить расход цветных сплавов или цветных металлов аппарата на 1 м3/ч расхода воды.
Основным критерием оптимального аппарата, принимается обеспечение в зоне обработки, определенного значения конструкционного модуля М [10]. Этот показатель представляет собой произведение магнитной индукции аппарата, скорости пересечения водой магнитного поля υ и времени нахождения воды в зоне обработки t.
М=Вср υ t, (2.1)
где М – конструкционный модуль, Тл·м;
Вср – средняя магнитная индукция, Тл;
υ – скорость потока жидкости, м/с;
t – время нахождения жидкости в магнитном поле, с.
Для тех систем, где скорость потока жидкости можно принять постоянной уравнение приобретет вид:
М=Вср l0, (2.2)
где l0 – путь воды в зоне обработки, м.
Опираясь на литературные данные, можно сказать, что эффективной обработка будет при значениях М = 0,002…0,02 Тл·м
Использование данного критерия проектировщиками позволяет им варьировать значениями магнитной индукции и шириной зоны обработки, для определения оптимальной конструкции аппарата, при сохранении заданного значения конструкционного модуля.
При проектировании, очень часто, сталкиваются с противоречивостью выбора из множества критериев. Необходимо учитывать важность критериев в каждом конкретном случае.
Получить магнитное поле в зоне обработки предполагается за счет изменения площади поперечного сечения магнитопровода, прохождению магнитного потока, что приведет к насыщению ферромагнитного материала в местах с наименьшим сечением. В результате насыщения этого участка, основной магнитный поток будет выталкиваться в окружающее пространство. Предполагаем, что возможно получить различные характеристики магнитного поля, изменяя конструкцию магнитной системы.
При составлении плана эксперимента нужно выбрать независимые факторы и расположить их априорно по значимости (ранжирование). Для сокращения объема исследований малозначащие факторы исключаются.
Исходя из формулы:
 , (2.3)
, (2.3)
можно сказать, что на величину конструкционного модуля (М) оказывают влияние следующие факторы: магнитодвижущая сила; длина тонкой шунтирующей стенки каркаса намагничивающей катушки; угол скоса полюсов каркаса намагничивающей катушки.
Если принять, что значение МДС остается неизменным, то особый интерес для исследования представляют собой два фактора.
Первый – α угол скоса полюса (Х1).
Второй – β длина тонкой стенки (Х2).
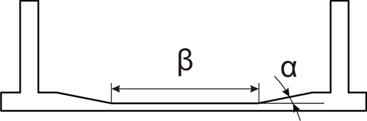
Рисунок 2.1 – Форма полюсов магнитной системы: α – угол скоса полюсов;
β – длина тонкой шунтирующей стенки
Комбинации условий двухфакторного эксперимента представлены в таблице 2.1.
Таблица 2.1 – Комбинации условий двухфакторного эксперимента
№ п/п | Х1 | Х2 |
1 | + | + |
2 | + | - |
3 | - | + |
4 | - | - |
Далее необходимо провести описание поверхности отклика, то есть определение коэффициентов уравнения регрессии методом крутого восхождения [14]. Суть метода состоит в следующем. Фиксируем фактор Х2 и начинаем движение от угла 100 до 900 с шагом 100. Фиксируем фактор Х1, изменяя длину тонкой стенки от 0 до 80 мм с шагом 10 мм.
В результате получается матрица исследований, представленная в таблице 2.2
Таблица 2.2 – Матрица проведения исследований
α β | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 |
0 | |||||||||
10 | |||||||||
20 | |||||||||
30 | |||||||||
40 | |||||||||
50 | |||||||||
60 | |||||||||
70 | |||||||||
80 |
Исходя, из полученной матрицы следует, что необходимо произвести расчет восьмидесяти одной конструкции магнитной системы.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
