

| UАРВ ос - UАРВ рез | ≥B, D= 0 , | I | ≤ A.
На рис. 6.4 приведены осциллограммы переходного процесса, вызванного отказом основного АРВ, который привел к неуправляемому развозбуждению. В момент возникновения неисправности выходное напряжение основного АРВ вышло на предельное положительное значение, при котором его дисперсия стала равна нулю. Неуправляемое развозбуждение вызвало уменьшение напряжения статора, и резервный АРВ сформировал выходной сигнал отрицательной полярности на форсирование возбуждения. Наличие существенной разности выходных напряжений регуляторов при отсутствии дисперсии выходного напряжения основного АРВ вызвало срабатывание блока БКД и переключение системы возбуждения на резервный канал. Напряжение статора в новом установившемся режиме отличается от исходного не более чем на 1 %.
Испытания на электродинамической модели и опытная эксплуатация на электростанциях продемонстрировали работоспособность двухканальной системы регулирования возбуждения. Блок БКД своевременно определяет отказ АРВ и осуществляет переключение системы регулирования на резервный канал.
Глава 7
ПАКЕТ ПРИКЛАДНЫХ ПРОГРАММ «МОДЕЛЬ»
7.1. Общая информация
Пакет прикладных программ (ППП) «Модель» представляет собой программный комплекс для выполнения всего объема работ по проектированию и эксплуатации современных систем регулирования возбуждения синхронных генераторов. Он позволяет проводить анализ устойчивости станции, работающей в составе энергообъединения, проектирование, настройку и проверку регулятора возбуждения АРВ— СДП1 и его блоков, а также может быть использован в качестве учебного пособия и тренажера для персонала электростанций. В ППП «Модель» реальная станция замещается эквивалентным генератором, а внешняя для станции сеть — схемой «линия—шины бесконечной мощности». Метод упрощения строго обоснован математически и подтвержден экспериментально (см. гл. 1).
Эти замены позволяют подробно описать систему регулирования возбуждения с учетом инерционных свойств и характеристик регулятора и возбудителя.
Параметры схемы замещения определяются с помощью программы «Расчет Х внешнего», использующей в качестве исходных данных значения активной, реактивной мощностей и напряжения генератора или шин в двух режимах работы станции. На основе полученной схемы замещения ППП «Модель» предлагает программы расчета режима и определения необходимых для устойчивой работы коэффициентов усиления в каналах стабилизации регулятора АРВ—СДП1.
Программа «Задать станцию» запросит у Вас данные и параметры эквивалентного генератора и схемы замещения, а также выбранные Вами базисные значения мощности и напряжения. Если пользователь в своих расчетах хочет учитывать насыщение исследуемого генератора, существует возможность использовать реактивность Потье, стандартные характеристики холостого хода и короткого замыкания. Пользователь может выбрать один из хранящихся в памяти вариантов для конкретного типа генератора или ввести эти данные самостоятельно. В дальнейшем эти данные сохраняются в памяти в течение сеанса работы со всеми остальными модулями пакета, если Вам не потребуется их изменить.
Программа «Нормальные режимы» снова запросит у Вас данные о параметрах эквивалентного генератора и схемы замещения, а также об интересующем Вас режиме. Пользователю предоставляется возможность задать один из вариантов:
— активную и реактивную мощности и напряжение эквивалентного генератора;
— активную мощность и напряжение эквивалентного генератора и модуль напряжения U в центре электрических качаний. На основе этих данных определяются все параметры, характеризующие режим электропередачи: Рг, Qг, Uг, Uс, Еq, Θ, Θг. Есть возможность графического построения диаграммы режимов в координатах Р—Q или Ia —Ir и нанесения на нее интересующего Вас режима. Кроме того, программа предоставляет возможность получить в табличной или графической форме статические характеристики электропередачи в зависимости от активной мощности или полного угла, запомнить их, повторить расчет и совместить на дисплее результаты для различных вариантов. По желанию пользователь может получить жесткую копию экрана дисплея.
Программный модуль «Коэффициенты усиления» предложит Вам воспользоваться введенными ранее данными о параметрах станции, эквивалентной энергосистемы и настройке регулятора. При желании Вы можете их изменить. После этого будет произведен расчет границы колебательной электромеханической устойчивости. Результаты могут быть выведены в табличном виде и в виде зависимостей K0u max(P) или K0u max(Θ). Результаты могут быть запомнены и нанесены на графики при последующих расчетах или выведены на печать. Подпрограмма «Расчет К0f, К1f» запросит значения мощности генератора и величины предельного коэффициента усиления по напряжению, который Вы хотите обеспечить в этом режиме. После этого будут выданы рекомендации о коэффициентах усиления по параметрам стабилизации, гарантирующих прохождение границы через заданную точку.
Программный модуль «Расчет переходных процессов» позволяет анализировать работу станции в полученной эквивалентной схеме при больших и малых возмущениях. Он построен на базе программы «CYPROS», имеющей дружественный интерфейс и предоставляющей пользователю широкий набор сервисных функций. Регулятор моделируется системой уравнений 21-го порядка, полученной на основе частотных характеристик реального регулятора АРВ—СДП1 (гл. 5). Математическое описание тщательно отработано на электродинамической модели и проверено на практике. Программа предоставляет пользователю широкий набор моделей возбудителей: статический ти-ристорный по схеме независимого возбуждения или самовозбуждения, диодный бесщеточный или высокочастотный (гл. 6). Переходные процессы при малых возмущениях рассчитываются при подаче на контрольный вход блока усиления регулятора пробного сигнала заданной формы (ступенчатый, синусоидальный или линейно нарастающий) . Расчетным возмущением для исследования динамических режимов является нормативное двухфазное короткое замыкание на землю на шинах станции длительностью 0.14 с. Эти расчеты позволяют проверить правильность работы системы регулирования возбуждения и регулятора и координировать ее с работой защит.
В модуле «Расчет блоков» более подробно задаются отдельные блоки регулятора и исследуется динамика их работы. Вы можете изучить характер процессов внутри блока, сравнить их с получаемыми в реальном блоке, вызывающем опасения, и определить неисправный узел.
Программный модуль «Расчет узлов», реализованный на базе стандартной программы «MICROCAP» [бб ], моделирует работу основных функциональных узлов и элементов регулятора АРВ-СДП1 (фазочувствительный выпрямитель, синхронный фильтр и т. д.). С его помощью можно получить временные диаграммы напряжений на всех элементах узлов, воспроизвести неисправность монтажной схемы или любого элемента и в конечном итоге точно установить причину неправильной работы любого узла и блока. В результате значительно сокращается время поиска неисправности реального оборудования и повышаются ремонтопригодность и срок службы регулятора.
ППП «Модель» — современное, обращенное к пользователю программное средство. Для его установки в описываемой версии необходим IBM-совместимый компьютер с сопроцессором, объемом ОЗУ не менее 640 кБт и объемом внешней памяти на магнитном диске около 3 МБт. Принтер — EPSON LX-800 или совместимый с ним. Адаптер дисплея — EGA, VGA, SVGA. Системное программное обеспечение — MS DOS версии не ниже 3.3.
7.2. Краткое описание модулей пакета
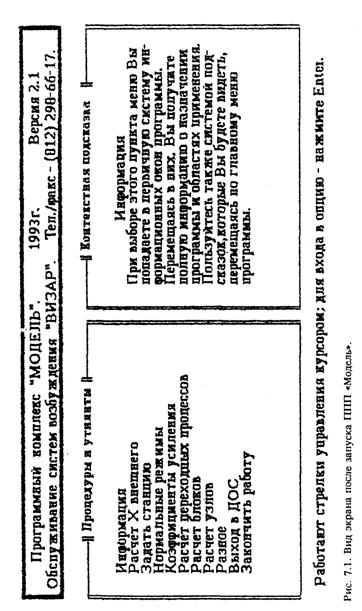
На рис. 7.1 показан вид экрана при запуске программы «Модель». В левом окне перечислены все модули и утилиты ППП. При подсвечивании маркером любой строки этого окна в правом окне появляется краткая контекстная подсказка. Ниже приведены тексты этих подсказок и результаты расчетов, выполняемых в каждом модуле.
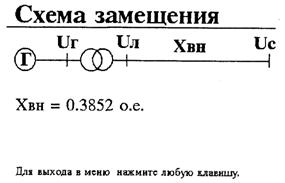
Рис. 7.2. Результат расчета внешнего эквивалентного сопротивления станции.
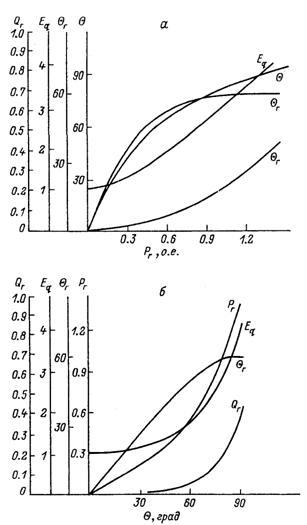
Рис. 7.3. Статические характеристики электропередачи в зависимости от активной мощности (а) и полного угла (б).
Расчет X внешнего.
Производится расчет параметров схемы замещения. Любая станция, работающая в энергосистеме, приводится к схеме машина—линия—ШБМ. Расчет ведется по результатам двух измерений режимов работы станции с неизменной схемой внешних присоединений. Требуются значения напряжения, активной и реактивной мощностей.
Результат расчета внешнего сопротивления представляется в графической форме (рис. 7.2).
Задать станцию.
Задать эквивалентные параметры. Ввод данных об исследуемой станции. Предлагается задать следующие параметры: Xd — продольную реактивность эквивалентного генератора [о. е. ]; Х'd— переходную реактивность, сопротивление Потье; Тd0 — постоянную обмотки возбуждения генератора; Tj— постоянную инерции ротора; cos φн, базисные значения мощности и напряжения, характеристики XX и КЗ.
Нормальные режимы.
Расчет нормальных режимов работы станции в энергосистеме. Производится расчет отдельных режимов, построение диаграммы режимов и статических характеристик. Необходимо задать Х внешнее, рассчитанное в первом пункте, напряжения на шинах станции и приемной ЭС, активную мощность. При этом используются заданные ранее параметры станции.
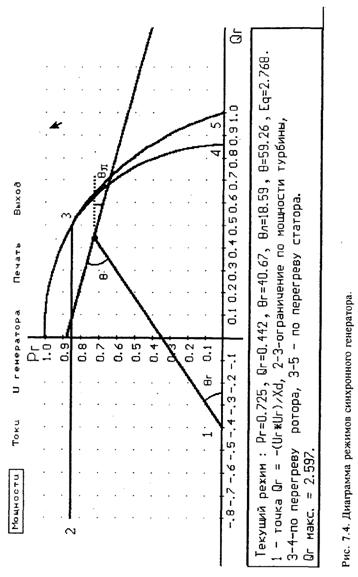
На рис. 7.3, 7.4 приведена форма получаемых результатов для основного расчетного случая.
Расчет коэффициентов усиления.
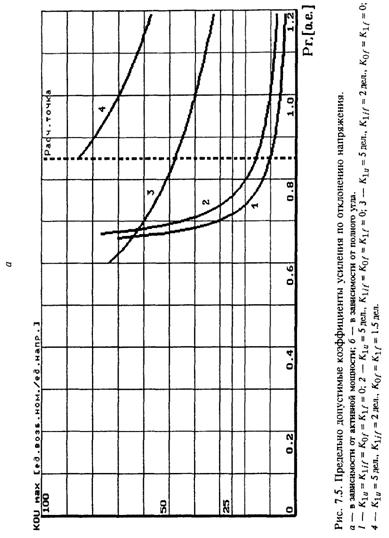
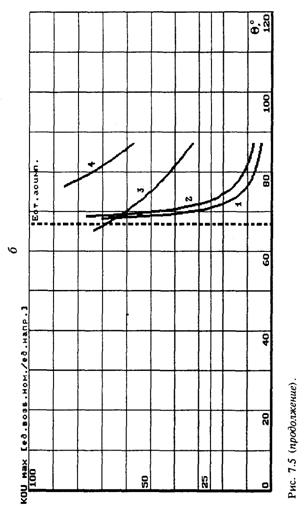
Производится расчет минимально допустимых коэффициентов усиления в каналах регуляторов возбуждения, установленных на заданной станции в любом интересующем Вас режиме. Программа построит низкочастотную границу устойчивости в координатах К 0u max = f (Pг) (рис. 7.5, а) или К 0u max =f (Θ) (рис. 7.5, б) при заданных значениях K1u, K1if, K0f, K1f.
Расчет переходных процессов.
Производится расчет переходных процессов генератора, оснащенного регулятором АРВ—СДП1 и работающего через линию на ШБМ при малых и больших возмущениях. Регулятор задается системой дифференциальных уравнений 21-го порядка.
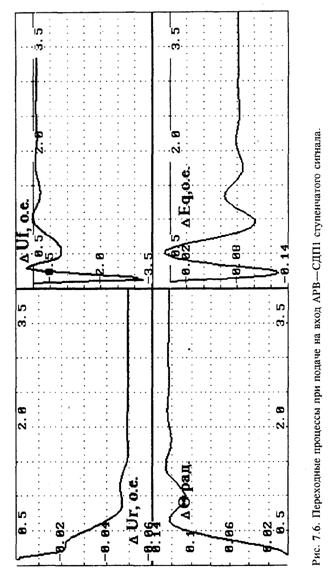
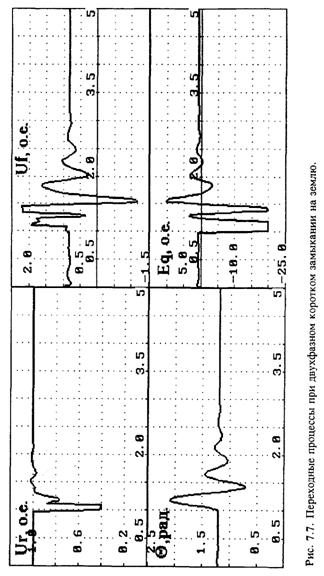
На рис. 7.6 приведены переходные процессы для некоторых переменных при подаче на вход АРВ ступенчатого сигнала, приводящего к снижению напряжения генератора на 5 %, на рис. 7.7 — при расчетном коротком замыкании.
Расчет блоков.
Расчет переходных процессов внутри конкретных блоков АРВ— СДП1. Блоки описаны уравнениями, соответствующими реальным принципиальным электрическим схемам.
Предлагаются блоки напряжения, ОМВ, тока, частоты и защиты, реактивного тока, измерения перегрузки.
9 ,
Расчет узлов.
В этой программе различные узлы и элементы регулятора моделируются на самом низком уровне — емкостей, резисторов, транзисторов, диодов, усилителей.
Имеется обширная база данных, содержащая все основные элементы и узлы. Можно не просто изучать работу таких узлов, как например синхронный фильтр, но и «сломать» в них любой элемент. В результате появляется возможность поиска неисправностей.
Разное.
В этом пункте предлагается набор вспомогательных утилит для временного хранения текстовой информации (записная книжка) и работы с диском (файл-менеджер).
ЛИТЕРАТУРА
1. Переходные процессы синхронной машины. Л.: Наука, 19с.
2. Вопросы устойчивости электрических систем. М.: Энергия, 19с.
3. Переходные электромеханические процессы в электрических системах. М.: Высш. шк., 19с.
4. , , и др. Сильное регулирование возбуждения. М.; Л.: Госэнергоиздат, 19с.
5. Применение аналоговых вычислительных машин в энергетических системах / Под ред. . М.: Энергия, 19с.
6. Операционное исчисление в задачах электротехники. Л.:
Энергия, 19с.
7. Электромагнитные процессы систем возбуждения синхронных машин. Л.: Наука, 19с.
8. , Математические основы теории автоматического управления режимами энергосистем. М.: Высш. шк., 19с.
9. , Электрические машины. Синхронные машины. М.: Высш. шк., 19с.
10. Микропроцессоры в энергетике / , , . Под ред. . Л.: Наука, 19с.
11. , Статическая устойчивость электрических систем. СПб.: Изд-во СПбГТУ, 19с.
12. Управление энергосистемами и их устойчивость. М.:
Энергия, 19с.
13. Л., , Определение настроек АРВ для совокупности режимов энергосистемы // Электричество. 1986. № 4. С. 11—15.
14. Метод упрощения математических моделей для управления демпферными свойствами электроэнергетических систем // Изв. РАН. Энергетика. 1992. № 2. С. 44—51.
15. , , Разработка методов и программного обеспечения для анализа статической устойчивости и демпферных свойств больших энергосистем // Методы и программное обеспечение для расчетов колебательной устойчивости энергосистем. СПб.: ФЭО, 1992. С. 66—88.
16. , Эквивалентирование схем и режимов электроэнергетических систем // Электричество. 1980. № 12. С. 9—14.
17. Узловой анализ электрических систем / Пер. под ред. . М.: Мир, 19с.
18. , Методы адаптивного эквивалентирования в задачах анализа установившихся режимов энергетических систем и управление ими // Изв. АН СССР. Энергетика и транспорт. 1989. № 6. С. 19—32.
19. Упрощение схем электрических сетей энергосистем для расчета установившихся режимов с локальными возмущениями // Изв. АН СССР. Энергетика и транспорт. 1991. № 4. С. 80—92.
20. Эквивалентирование сложных электроэнергетических систем при заданных мощностях узлов // Электричество. 1993. № 12. С. 10—15.
21. Yurganov A. A. Equivalent external reactance determination for a Power Plant operating in a complex electric Power System / 9th Intern. Power System conference PSC-94. July 1994. StPetersburg. P. 145—151.
22. и др. Комплекс программ для расчета устойчивости энергосистем (версия 1984) // Исследования в области устойчивости энергосистем и противо-аварийной автоматики. М.: Энергоиздат, 1986. С. 90—94.
23. Wirth E., Castelli G. POSCOLab — моделирующая программа для анализа нагрузочного потока, короткого замыкания и устойчивости электросетей // Обзор ABB. 1993. № 5. С. 19—28.
24. , X. Расчет колебательной устойчивости энергосистем и оптимизация настроек АРВ генераторов // Методы и программное обеспечение для расчетов колебательной устойчивости энергосистем. СПб.: ФЭО, 1992. С. 36—43.
25. Тестовая схема для расчетов статической устойчивости энергосистем / , 3. Г. Хвощинская, , нов // Методы и программное обеспечение для расчетов колебательной устойчивости энергосистем. СПб.: ФЭО, 1992. С. 66—88.
26. Roth A. Identifikation der Leitungsreaktanz zur Realisierung der adaptiven Schlupf-stabilisierung // Brown Boveri Mitt. 1983. Bd 70, N 9/10. S. 360—364.
27. Основы теории переходных процессов синхронной машины. М.;
Л.: Госэнергоиздат, 19с.
28. Расчет синхронных машин. Л.: Энергия, 19с.
29. Уравнения и структурная схема синхронного генератора при автоматическом регулировании возбуждения // Изв. АН СССР. ОТН. 1952. № 9. С. 1322—1330.
30. О статической устойчивости электропередачи в связи с наличием нескольких генераторов на передающей станции // Изв. АН СССР. ОТН. 1957. № 7. С. 3—7.
31. , , Выбор места включения блока частоты АРВ турбогенераторов // Автоматическое регулирование и управление в энергосистемах: Труды ВЭИ. М.: Энергия, 1968. Вып. 78. С. 193—199.
32. Синтез структуры системы автоматического регулирования возбуждения синхронных машин. М.: Высш. шк., 19с.
33. Системы возбуждения мощных синхронных машин. Л.: Наука, 19с.
34. Переходные электромеханические процессы в электрических системах. М.: Высш. шк., 19с.
35. Курс дифференциального и интегрального исчисления. М.: Наука, 19с.
36. , , Резервный автоматический регулятор возбуждения мощного генератора // Проблемы создания гидрогенераторов и крупных электрических машин: Тез. докл. Всесоюз. совещ. Л.: ВНИИэлектромаш, 1981. С. 172—173.
37. , , М., А, Способ формирования стабилизирующего параметра для регулирования возбуждения синхронной электрической машины: А. с. 498704 СССР // Б. И. 1976. № 1.
38. , , Стабилизатор для регулятора возбуждения синхронной машины: А. с. 658694 СССР // Б. И. 1979. № 15.
39. , , Регулирование возбуждения современных мощных гидро - и турбогенераторов и синхронных компенсаторов // Проблемы электроэнергетики и электромеханики. Л.: Наука, 1977- С. 50—55.
40. Устройство для моделирования синхронного генератора: А. с. 519731 СССР // Б. И. 1976. № 24.
41. . , Электрические системы. Передача энергии переменным и постоянным током высокого напряжения. М.: Высш. шк., 19с.
42. Автоматический регулятор возбуждения для гидрогенераторов с ионной системой возбуждения Волжской ГЭС им. // Вести, электропромышленности. 1961. № 6. С. 11—16.
43. Kocmeнкo М. П., , Регулирование напряжения и устойчивость при параллельной работе генераторов электростанций на две энергосистемы // Электричество. 1959. № 12. С. 1—10.
44. Каштелян. В. Е. Регулятор напряжения электромагнитный // Автоматизация производства и промышленная электроника. М.: Сов. энциклопедия, 1994. Т. 3. С. 215—219.
45. Автоматические регуляторы возбуждения сильного действия для гидрогенераторов, турбогенераторов и синхронных компенсаторов с ионной системой возбуждения / , , -шванг, // Автоматические регуляторы возбуждения: Тр. ВЭИ. М.: Энергия, 1966. Вып. 73. С. 11—32.
46. Автоматические регуляторы возбуждения сильного действия для главных гидрогенераторов Асуанской ГЭС и синхронных компенсаторов электропередачи Асуанская ГЭС—Каир / , , В. К. Шабад, // Автоматическое регулирование и управление в энергосистемах:
Тр. ВЭИ. М.: Энергия, 1968. Вып. 78. С. 7—28.
47. Схема унифицированного автоматического регулятора возбуждения сильного действия для гидрогенераторов, турбогенераторов и синхронных компенсаторов с ионной и тиристорной системами возбуждения / , , // Автоматическое регулирование и управление в энергосистемах: Тр. ВЭИ. М.: Энергия, 1972. Вып. 81. С. 5—17.
48. Унифицированный автоматический регулятор возбуждения сильного действия на полупроводниковых элементах / , , // Автоматическое регулирование и управление в энергосистемах: Тр. ВЭИ. М.: Энергия, 1977. Вып. 83. С. 3—13.
49. Регуляторы возбуждения сильного действия на интегральных микросхемах для мощных синхронных генераторов / , , М. И. Покровский, , // Автоматическое регулирование и управление в энергосистемах: Тр. ВЭИ. М.: Энергия, 1980. Вып. 89. С. 3—10.
50. Математическая модель бесщеточного возбудителя для расчета статической устойчивости турбогенератора / , , нов, , // Бесщеточные системы возбуждения мощных синхронных машин. Л.: ВНИИэлектромаш, 1986. С. 90—104.
51. , , Микропроцессорный регулятор возбуждения мощных турбо- и гидрогенераторов // Системы возбуждения и регулирования мощных синхронных генераторов. Л.: ВНИИэлектромаш, 1985. С. 3—14.
52. , , Микропроцессорный унифицированный автоматический регулятор возбуждения сильного действия АРВ— СДМ // Автоматическое регулирование и управление в энергосистемах: Сб. науч. трудов. М.: Энергоатомиздат, 1983. С. 3—12.
53. Перспективная система цифрового управления возбуждением мощных турбо-и гидрогенераторов на базе МКС УВТ В10 / , , В. В. Ки-чаев, , // Проектирование и исследование систем возбуждения мощных синхронных машин. Л.: ВНИИэлектромаш, 1989. С. 62—73.
54. Научные разработки ВНИИэлектромаш // Системы возбуждения и регулирования мощных генераторов и двигателей. СПб.: ВНИИэлектромаш, 1994. С. 140— 167.
55. Применение цифровых вычислительных машин в электроэнергетике / Под ред. . Л.: Энергия, 19с.
56. , Системы автоматического регулирования возбуждения синхронных генераторов. Л.: ЛПИ, 19с.
57. Динамические характеристики АРВ сильного действия и вопросы методики их настройки // Автоматическое регулирование и управление в энергосистемах: Тр. ВЭИ. М.: Энергия, 1978. Вып. 78. С. 37—60.
58. Эквивалентирование АРВ сильного действия и системы возбуждения в расчетах статической устойчивости // Там же. С. 199—212.
59. Методические указания по наладке тиристорной системы возбуждения турбогенераторов серии ТВВ мощностью 165—800 МВт. МУ 34—70—024—82. М.: Союз-техэнерго, 19с.
60. Методические указания по наладке тиристорных систем возбуждения с АРВ сильного действия турбогенераторов ТГВ-300 и ТГВ-200. М.: ОРГРЭС, 19с.
61. Модернизация высокочастотных систем возбуждения турбогенераторов серии ТВВ / , , // Электрические станции. 1995. № 5. С. 21—28.
62. , , Частотные характеристики возбудителей с неуправляемыми выпрямителями // Электричество. 1980. № 5. С. 44—47.
63. Машинный возбудитель переменного тока как звено системы автоматического регулирования // Электричество. 1973. № 12. С. 31—36.
64. Переходные процессы бесщеточного возбудителя // Электричество. 1978. № 10. С. 35—39.
65. Справочник по проектированию электроэнергетических систем / Под ред. и . М.: Энергия, 19с.
66. Моделирование аналоговых электронных устройств на персональных ЭВМ. М.: Изд-во МЭИ, 19с.
67. Методы и средства автоматического регулирования возбуждения турбо - и гидрогенераторов // Творческое наследие академика и его значение для современного и перспективного электромашиностроения. СПб.: Наука, 1992. С. 132—158.
ОГЛАВЛЕНИЕ
Стр.
Предисловие .........………………………………………………………….......................... 3
Список принятых обозначений...........…………………………………………................. 6
Глава 1. Математическая модель системы регулирования возбуждения
синхронной машины, работающей в энергосистеме .....…………………...... 7
1.1. Метод эквивалентирования внешней электрической сети станции …………..... 7
1.2. Математические модели объекта регулирования для исследования
внешнего и внутригруппового движения...............………………………......... 11
1.3. Структурная схема системы автоматического регулирования напряжения
генератора..............…………………………………………………....................... 17
Глава 2. Предельно допустимые коэффициенты усиления по отклонению
напряжения...............…………………………………………………................... 22
2.1. Условия устойчивости..................…………………………………….…….......... 22
2.2. Пропорциональное регулирование (К1u=К1if=Кf=0) .………………..…....…….... 24
2.2.1. Предел колебательной устойчивости при больших значениях
коэффициента регулирования по напряжению.....……………….……... 25
2.2.2. Предельно достижимый режим................…………………………….…... 33
2.3. Влияние параметров стабилизации на предельный коэффициент усиления по напряжению ...............……………………………………………..............………….. 34
2.4. Влияние реактивных сопротивлений генератора
на статическую устойчивость..............………………………….........………... 37
Глава 3. Статическая устойчивость регулируемой синхронной машины ………... 40
3.1. Экспресс-метод оценки статической устойчивости.……………………............ 40
3.1.1. Границы апериодической устойчивости...........…………………...…….. 42
3.1.2. Границы электромеханической колебательной устойчивости ….……... 47
3.1.3. Рекомендации по применению.............………………………….……...... 49
3.2. Статическая устойчивость при включенных каналах стабилизации.………..... 50
3.3. Внутригрупповое движение.....................……………………………………….... 57
Глава 4. Автоматические регуляторы возбуждения синхронных машин …….…... 61
4.1. Развитие сильного регулирования возбуждения синхронных машин ……….... 61
4.2. Назначение и состав АРВ—СДП1 ...............…………………………………........ 63
4.3. Типовые узлы регулятора..................……………………………………….......... 67
4.3.1. Синхронный фильтр .........…………………………………….................... 67
4.3.2. Фазочувствительный выпрямитель ……………………………................. 70
4.3.3. Управляемый интегратор ..................…………………………………....... 71
4.3.4. Быстродействующее запоминающее устройство ………………….......... 72
4.4. Устройство и работа блоков регулятора АРВ—СДП1 ....…………………......... 73
4.4.1. Блок напряжения......................…………………………………………..... 73
4.4.2. Блоки реактивного тока...................……………………………………..... 75
4.4.3. Блок частоты и защиты......................……………………………………... 78
4.5. Математическая модель автоматического регулятора возбуждения АРВ—
СДП1 ...............………………………………………………………....................... 81
4.6. Четвертая стадия развития сильного регулирования возбуждения.…………... 87
4.7. Назначение и состав АРН .......................………………………………………..... 89
4.8. Устройство и работа блоков АРН..............…………………………………......... 90
4.8.1. Измерительный блок................………………………………………......... 90
4.8.2. Датчик тока ротора................………………………………………........... 91
4.8.3. Блок обратной связи................……………………………………............. 93
4.8.4. Операционный блок................……………………………………….......... 93
4.9. Математическая модель АРН ..............……………………………………............ 94
Глава 5. Математическое описание современных систем возбуждения
синхронных генераторов .....................………………………………….......... 97
5.1. Статические тиристорные системы возбуждения ....………………………......... 97
5.2. Математическая модель системы управления тиристорами...………………..... 99
5.3. Упрощенная математическая модель статической тиристорной системы
возбуждения..........………………………………………………......................
5.4. Бесщеточная система возбуждения ...................……………………………….
5.5. Упрощенная математическая модель бесщеточного диодного возбудителя.
5.6. Модернизированная высокочастотная система возбуждения.……………....
Глава 6. Способы повышения надежности и эффективности
регулирования возбуждения ..............................…………………………….. 114
6.1. Методика и устройство для проверки и наладки систем регулирования
возбуждения.......................………………………………………………..........
6.2. Двухканальная система регулирования возбуждения ....…………………......
Глава 7 . Пакет прикладных программ «Модель» ....………………………….......
7.1. Общая информация........……………………………………………...................
7.2. Краткое описание модулей пакета........………………………………............
Литература..................…………………………………………………………….........
Научное издание
Алексей Анатольевич Юрганов,
Владимир Александрович Кожевников
РЕГУЛИРОВАНИЕ ВОЗБУЖДЕНИЯ СИНХРОННЫХ ГЕНЕРАТОРОВ
Утверждено к печати
Научно-исследовательским институтом электромашиностроения
Художник
Технический редактор
Корректор А. X. Салтанаева
Компьютерная верстка
ЛР№ 000 от 27.11.91. Сдано в набор 26.10.95.
Подписано к печати 29.04.96. Формат 60х90 1/16.
Бумага офсетная. Гарнитура таймс. Печать офсетная. Усл. печ. л. 9.0. Уч.-изд. л. 8.8. Тираж 500 экз.
Тип. зак. № 000. С 1367.
Санкт-Петербургская издательская фирма РАН Санкт-Петербург, Менделеевская лин., 1
Санкт-Петербургская типография № 1 РАН Санкт-Петербург, 9 лин., 12

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
