

Стабилизация «по частоте эдс»
В этом случае Δf = рΔΘi,
![]()
В случае безынерционного измерения частоты эдс этот сигнал представляет собой внешнюю отрицательную гибкую обратную связь по отклонению взаимного угла и не может вызвать внутригруппового движения.
Однако при этом повышается собственная частота внутригруппо-вых колебаний. При наличии запаздывания в реальном тракте сигналов Δfэдс и Δf 'эдс могут появиться значительные фазовые сдвиги сигналов по каналам стабилизации. В регуляторе АРВ—СД, например, на частотах свыше 1 Гц этот сдвиг настолько велик, что реальный сигнал по производной частоты может изменить знак и превратиться в положительную обратную связь. Этим и обедняются ограничения, накладываемые на высокочастотную границу области устойчивости внутригрупповым движением [31 ].
Стабилизация «по мощности»
Многими фирмами применяется стабилизация «по мощности», когда
После линеаризации выражения для активной мощности
в наиболее благоприятном для демпфирования внутригрупповых колебаний режиме равной загрузки двух генераторов по активной и реактивной мощностям получим:

Как и в случае стабилизации «по току», стабилизация «по мощности» может быть представлена в виде двух составляющих. К первой, по отклонению взаимного угла ΔΘ12, относится все сказанное выше о стабилизации «по частоте эдс». Некоторое отличие заключается только в том, что в данном случае она пропорциональна косинусу исходного внутреннего угла. Эта значит, что ее стабилизирующее действие ослабевает в режимах глубокого потребления реактивной мощности и искусственной устойчивости.
Вторая составляющая является положительной обратной связью по разности отклонений индивидуальных токов возбуждения, действие которой усиливается по мере роста внутреннего угла. Она всегда способствует подчеркиванию внутригрупповых колебаний.
Таким образом, стабилизация «по мощности» может удовлетворительно стабилизировать режим только тех станций, которые работают на короткие линии в мощных энергообъединениях и не попадают в режим глубокого недовозбуждения. Именно поэтому при проектировании АРВ—СД было отдано предпочтение стабилизации «по частоте напряжения».
Стабилизация по энергетическому параметру П
Наилучшее демпфирование взаимного движения станции относительно других частей сложной энергосистемы обеспечивает параметр П, полученный на основе использования принципа максимальной скорости затухания избыточной энергии [37 ]. Для его формирования используется только местная информация, однако при этом правильно отражается взаимное движение генераторов регулируемой станции относительно других генерирующих агрегатов и центра электрических качаний системы.
Параметр П может быть представлен в виде:
![]()
где Ej — эдс всех станций, кроме исследуемой, и фиктивные эдс нагрузок; Yij — взаимные проводимости между точками приложения эдс регулируемого генератора, эквивалентирующего исследуемую станцию, и остальных эдс; Θij и sij — взаимные фазовые углы и их производные (скольжения) по всем направлениям; Рij — активные мощности, выдаваемые исследуемой станцией по всем направлениям.
Была разработана [38] и тщательно проверена на электродинамической модели энергосистем аппаратура выявления параметра П, реализующая алгоритм
![]()
где uqг и idг - — поперечная составляющая напряжения и продольная составляющая тока эквивалентного регулируемого генератора в осях d-q; К — весовой коэффициент, численно равный внешнему для регулируемого генератора сопротивлению Хвн до центра электрических качаний системы, выраженный в о. е.
Тщательное сравнение эффективности параметров Δfu и П проведено в [39]; наиболее четко преимущества параметра П проявились при работе станции на несколько направлений, а также при возмущениях, связанных с небалансами мощности в приемной системе. Однако при этом возникли трудности с внутригрупповым движением.
В этом случае

Преобразовав уравнения установившегося режима, получим:

После линеаризации для режима равной загрузки генераторов
(Θ12 = 0) имеем, что

Значит,

и стабилизация по параметру П представляет собой внутреннюю положительную гибкую обратную связь по разности отклонений токов возбуждения. Интенсивность ее тем выше, чем больше значение Хвн. Предельный коэффициент по отклонению параметра
K0 п max = Td0X'd/Xвн. При больших значениях К0п нарушается колебательная устойчивость электромагнитных контуров.
Таким образом, самым главным недостатком параметра П, выявляемого согласно (3.39), является наличие в нем индивидуального тока id г. При учете всей станции одним эквивалентным генератором он не проявляется. Однако при наличии нескольких генераторов, работающих на общие шины, составляющая, пропорциональная id г, вызывает внутригрупповое движение этих генераторов между собой. Выявление П по общестанционным параметрам uqш, ![]() , и последующее распределение между машинами позволили бы обойти этот недостаток. Однако решение подобной задачи на практике без применения вычислительной техники невозможно. Именно по этой причине, несмотря на всю его привлекательность, этот закон регулирования остается нереализованным.
, и последующее распределение между машинами позволили бы обойти этот недостаток. Однако решение подобной задачи на практике без применения вычислительной техники невозможно. Именно по этой причине, несмотря на всю его привлекательность, этот закон регулирования остается нереализованным.
Глава 4
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ СИНХРОННЫХ МАШИН
4.1. Развитие сильного регулирования возбуждения синхронных машин
Первый АРВ сильного действия на электронных лампах был создан в конце 50-х годов для регулирования возбуждения гидрогенераторов Волжской ГЭС им. [42]. Он имел ПД-закон регулирования напряжения с коэффициентом усиления по пропорциональной составляющей К0u =- 50 е. в.н./е. н. и использовал в качестве параметров стабилизации первую и вторую производные тока линии или среднего тока параллельно работающих генераторов. Последовавшие за этим разработки были направлены на совершенствование структуры и конструкции регуляторов, повышение надежности их работы. Предпочтение было отдано стабилизации по изменению и по первой производной частоты напряжения генератора [43 ], что позволило значительно упростить схему подключения и условия эксплуатации регулятора, сделав его независимым от коммутаций в первичной схеме станции. Для повышения надежности усилители на электронных лампах были заменены быстродействующими магнитными усилителями [44 ]. АРВ сильного действия на магнитных усилителях со стабилизацией «по частоте» были внедрены на Волжской ГЭС имени XXII съезда КПСС [45 ], Братской и Асуанской ГЭС [46 ].
На этой первой стадии работ по созданию и внедрению АРВ для каждой новой электростанции разрабатывался по существу новый, более совершенный тип регулятора, поскольку накопленный опыт был еще недостаточен для окончательного выбора принципа действия, схемы и конструкции.
Сутью второй, закончившейся в начале 70-х годов, стадии развития АРВ стало создание унифицированного регулятора АРВ—СД для всех типов синхронных машин (гидро-, турбогенераторов и синхронных компенсаторов) в составе различных типов систем возбуждения (независимых, систем самовозбуждения и бесщеточных) [47 ]. Серийный выпуск его продолжался до 1983 г.
АРВ—СД осуществлял пропорционально-дифференциальное регулирование напряжения статора с фиксированным коэффициентом по отклонению напряжения, равным 15, 25 или 50 е. в.н./е. н. Стабилизация режима обеспечивалась сигналами изменения и первой производной частоты напряжения статора, а также первой производной
тока ротора. Предусматривался охват возбудителя жесткой (ЖОС) и гибкой (ГОС) обратными связями по напряжению ротора. Наряду с традиционными функциями поддержания напряжения и обеспечения устойчивости регулирования АРВ—СД выполнен также ряд дополнительных функций по защите генератора и автоматизации технологических процессов, тем самым существенно повышая надежность работы основного оборудования. По объему функций и алгоритмическому обеспечению он превосходил зарубежные разработки того времени.
Было разработано достаточно подробное математическое описание регулятора АРВ-СД, выполненного по проектной схеме [55— 58]. Однако параметры магнитных усилителей имели большой разброс, поэтому на каждом генераторе в процессе наладки регулятора в его схему приходилось вносить изменения в соответствии со специально разработанными рекомендациями [59, 60 ]. В связи с этим использование стандартного математического описания АРВ—СД не всегда корректно. Для получения достоверных результатов требуется уточнение параметров АРВ—СД конкретной станции. Исходными данными для такого уточнения могут служить статические и частотные характеристики звеньев и каналов регулирования, определенные после внесенных в процессе наладки изменений схемы регулятора. Если частотные характеристики какого-либо элемента регулятора отсутствуют, допустимо использование стандартного математического описания этого элемента с обязательной проверкой интегральных характеристик канала, в который он входит.
Развитие микроэлектронной техники вызвало моральное старение регулятора АРВ—СД. Поэтому в 1977 г. был разработан унифицированный полупроводниковый регулятор возбуждения типа АРВ—СДП [48, 49 ] на базе полупроводников и интегральных микросхем. Структурно и алгоритмически он повторял АРВ—СД, были также повторены многие узлы прототипа (промежуточные трансформаторы, потенциал-регулятор в блоке уставки и т. д.). Этой переходной моделью были оснащены шесть гидрогенераторов Саяно-Шушенской ГЭС, что позволило накопить опыт эксплуатации полупроводниковой аппаратуры. Затем серийный выпуск был прекращен.
Последним полупроводниковым регулятором аналогового типа стал регулятор АРВ—СДП 1 [41 ], которым с 1982 г. оснащаются все синхронные генераторы мощностью от 63 МВт и выше. Это по существу компактный, высокотехнологичный специализированный аналоговый измерительно-вычислительный комплекс, дополненный релейной аппаратурой и по своим характеристикам (табл. 4.1) намного превосходящий предыдущие образцы. По сравнению с предшественниками он выполняет большее количество функций, структурно отличается частотно-зависимой характеристикой канала регулирования напряжения, что повышает качество поддержания напряжения, увеличивает устойчивость регулирования и инвариантность настройки к изменению режима работы гене-
Т а б л и ц а 4.1
Сравнительные показателя регуляторов возбуждения
Показатель | Тип регулятора | ||
АРВ—СД | АРВ—CДП | АРВ—СДП1 | |
Масса регулятора, кг встраиваемый вариант в отдельном шкафу Потребляемая мощность, В-А по цепям питания по цепям измерения тока по цепям измерения напряжения Максимальный коэффициент регулирования по напряжению, е. в. н./е. н. Точность работы ограничения тока возбуждения, % Коэффициент готовности | — 1010 1500 390 120 50 ± 10 0.99 | — 700 500 120 63 75 ± 10 0.995 | 48 250 50 10 10 200 ±5 0.999 |
ратора и сети за счет динамического снижения коэффициента усиления по отклонению напряжения в области частот собственных колебаний.
Созданием и внедрением в эксплуатацию АРВ—СДП1 завершилась третья стадия развития регулирования возбуждения сильного действия. В настоящее время выпускаются четыре модификации для работы в составе одно - и двухгрупповых систем возбуждения генераторов обычного исполнения и обратимых агрегатов ГАЭС. Ими оснащаются все генераторы мощностью 63 МВт и выше, выпускаемые в СНГ. Поэтому целесообразно подробно описать этот регулятор.
4.2. Назначение и состав АРВ—СДП1
Регулятор совместно с быстродействующей системой возбуждения выполняет большое число разнообразных функций, которые условно можно разделить на четыре группы: системные, технологические, защитные, самоконтроль и диагностика [10].
Системные функции включают в себя:
— поддержание напряжения в точке регулирования с заданными точностью и статизмом;
— обеспечение устойчивости регулирования во всех режимах работы генератора, включая холостой ход, работу в зоне искусственной устойчивости с внешним фазовым углом, приближающимся к 90°, и в режиме недовозбуждения при больших внутренних углах генератора;
— интенсивное демпфирование малых колебаний и больших по-слеаварийных качаний, возникающих в энергосистеме;
— обеспечение высокого уровня динамической устойчивости путем форсирования возбуждения вплоть до предельного значения при коротких замыканиях и набросах нагрузки во внешней электрической сети.
Технологические функции автоматизируют процессы управления током возбуждения, переходы от одного режима к другому, передачу информации о состоянии генератора и системы возбуждения. К ним относятся:
— программное начальное возбуждение генератора при пуске;
— подгонка напряжения генератора к напряжению сети при автоматической точной синхронизации или при самосинхронизации;
— дистанционное изменение уставки напряжения с блочного или общестанционного щита управления;
— обеспечение работы в системе группового регулирования напряжения генераторов электростанции;
— разгрузка генератора по реактивной мощности и программное развозбуждение при плановом останове генерирующего агрегата;
— поддержание по получении команды постоянства тока ротора;
— постоянная подгонка уставки, обеспечивающая равенство выходных напряжений основного и резервного регуляторов при работе системы возбуждения на резервном АРВ.
Реализация системных и технологических функций может привести к изменению регулирующего сигнала, выводящему режим работы генератора или системы возбуждения за допустимые границы. В этом случае необходим переход с основного алгоритма работы АРВ на защитный, который обеспечит возврат режима в допустимые границы. В зависимости от характеристик основного оборудования этот возврат может происходить либо безынерционно, либо с определенной выдержкой времени.
К защитным функциям относятся:
— ограничение максимального тока ротора с учетом теплового состояния генератора и числа исправных вентилей преобразователя;
— ограничение перегрузки по токам ротора и статора в соответствии с заданными тепловыми характеристиками генератора;
— ограничение минимального возбуждения с уставкой, зависящей от величины активной мощности генератора и обусловленной допустимым нагревом торцевой зоны статора;
— ограничение максимального напряжения статора при обрыве электропередачи и связанным с ним повышении частоты;
— пропорциональное уменьшение напряжения статора при сильном снижении частоты;
— автоматическая разгрузка по индуктивной реактивной мощности генератора при повреждении вентилей преобразователя;
— ограничение максимального напряжения ротора в бесщеточных системах возбуждения.
Функции самоконтроля и диагностики включают в себя:
— контроль соответствия величины отклонения напряжения статора и выходного напряжения регулятора;
— контроль состояния выходного усилителя;
— контроль исправности источника питания.
При несоответствии величин отклонения напряжения и выхода АРВ, при отказе выходного усилителя или потере питания регулятора блок контроля выдает команду перевода системы возбуждения на резервный регулятор.
В состав регулятора входят 16 блоков (рис. 4.1).
Блок питания (БП) подключен к трансформатору собственных нужд переменного тока системы возбуждения. Он преобразует входное трехфазное напряжение в стабилизированное напряжение постоянного тока величиной ±12.6 В, которым питаются все блоки регулятора. При отсутствии переменного трехфазного напряжения или при отказе БП происходит автоматическое переключение питания АРВ на резервный источник ИПР, подключенный к сети постоянного оперативного тока станции.
Блок уставки напряжения (БУН) формирует значение уставки регулируемого напряжения. Управление уставкой осуществляется от кнопок на лицевой панели БУН или дистанционно от ключа на блочном или общестанционном щите управления.
Блок напряжения (БН) формирует сигналы отклонения напряжения статора от заданного значения и первой производной напряжения статора.
Блок реактивного тока БРТ-1 формирует сигнал, пропорциональный реактивной составляющей тока статора генератора для реализации заданного статизма регулирования. В случае работы генераторов на общие шины статизм регулирования задается отрицательным, а при работе блока «генератор—трансформатор» — положительным. Блок реактивного тока БРТ-2 формирует сигнал, пропорциональный реактивной составляющей группы генераторов, объединенных шинами генераторного напряжения. Этот сигнал компенсирует падение напряжения в общем повышающем трансформаторе и восстанавливает требуемый статизм. Так обеспечивается устойчивая работа группы генераторов при низком статизме.
Блок токов (БТ) вырабатывает напряжения, пропорциональные токам ротора и статора, которые затем используются для ограничения перегрузок. Кроме того, БТ формирует сигнал стабилизации по производной тока ротора.
Тепловые характеристики нагрева заложены в блоке измерения перегрузки (БИП). В зависимости от величины перегрузки БИП отсчитывает допустимую выдержку времени [40] и выдает сигнал о перегреве.
Блок ограничения тока ротора (БОР) осуществляет ограничение
5 ,
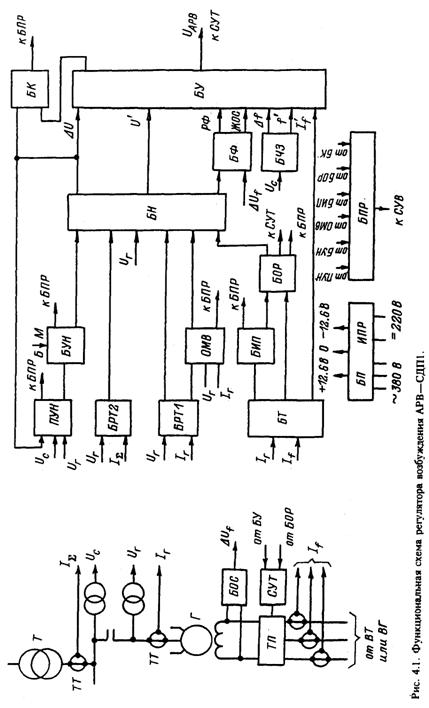
максимального тока ротора, воздействуя на систему управления ти-ристорами, а также уменьшает уставку напряжения при перегреве генератора до допустимого уровня.
Форсирование возбуждения при снижении напряжения статора ниже заданной уставки обеспечивает блок форсировки (БФ). Благодаря этому обеспечиваются высокие пределы динамической устойчивости.
Блок ограничения минимального возбуждения (ОМВ) осуществляет защиту торцевых зон статора от недопустимого нагрева. В него закладывается граница допустимых режимов [40] в координатах активной и реактивной составляющих тока статора. При выходе режима работы генератора за ее пределы безынерционно увеличивается уставка напряжения статора. Если конструкция генератора исключает перегрев торцевых зон, то граница ОМВ может быть перестроена на ограничение внутреннего угла генератора (ограничение по устойчивости).
Сигналы стабилизации, пропорциональные изменению и первой производной частоты напряжения, формирует блок частоты и защиты (БЧЗ). При одновременном увеличении напряжения статора, частоты и производной частоты, что характерно при обрыве электропередачи, выход БЧЗ блокируется с целью исключения ложного форсирования.
Подгонка напряжения генератора к напряжению сети при автоматической точной синхронизации и самосинхронизации осуществляется блоком подгонки (ПУН). После окончания подгонки ПУН выдает соответствующий сигнал.
Суммирование и усиление сигналов регулирования и стабилизации происходят на блоке усиления (БУ). Его выходной сигнал является выходом АРВ, поэтому БУ осуществляет гальваническую развязку между цепями АРВ и системы управления тиристорным преобразователем (СУТ).
4.3. Типовые узлы регулятора
Блоки АРВ—СДП1 спроектированы из ряда типовых узлов. Рассмотрим наиболее характерные из них.
4.3.1. Синхронный фильтр
Синхронный фильтр (СФ) предназначен для формирования аналогового сигнала, равного среднему значению входного напряжения. При этом он подавляет переменную составляющую входного напряжения частоты, равной частоте сигнала управления и кратной ей. Фильтр состоит из операционного усилителя, собранного по схеме интегратора, и трех транзисторов (рис. 4.2). Транзистор Т1 работает в режиме ключа и управляется от Т2. На двойном транзисторе ТЗ собран истоковый повторитель.
5*
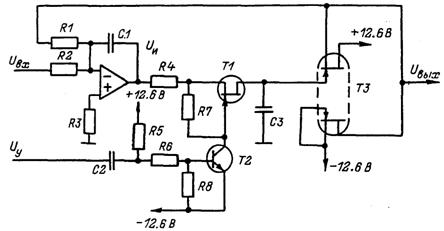
Рис. 4.2. Синхронный фильтр.
Рассмотрим работу СФ при скачкообразном изменении входного напряжения, произошедшем в середине периода управляющего сигнала (момент времени t0 , рис. 4.3).
В исходном состоянии (t <t0) ток, протекающий по цепи R5—R6— R8, создает положительное падение напряжения на базе транзистора Т2 по отношению к его эмиттеру. При этом Т2 открыт и отрицательное напряжение источника питания поступает на затвор транзистора 77, тем самым запирая его. Закрытое состояние Т1 соответствует разомкнутому состоянию ключа. В этом случае отсутствует цепь заряда и разряда конденсатора СЗ и его напряжение остается неизменным при изменении входного напряжения и напряжения интегратора. В
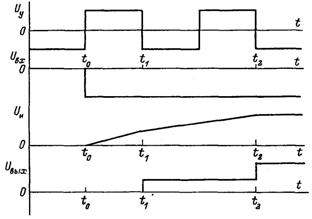
Рис. 4.3. Временные диаграммы работы синхронного фильтра.
момент времени t0, соответствующий фронту входного сигнала, операционный усилитель начинает интегрировать. В момент времени t1, соответствующий изменению полярности управляющего сигнала с положительной на отрицательную, импульс отрицательной полярности запирает транзистор Т2. Напряжения на истоке и затворе T1 становятся равными, и ключ замыкается. Происходит заряд конденсатора СЗ через резистор R4 до напряжения интегратора. Очевидно, что заряд СЗ произойдет до указанной величины только в том случае, если постоянная времени заряда, равная T3 = R4C3, будет меньше 4-кратной длительности импульса, определяемой параметрами дифференцирующей цепи C2—R5—R6—R8. Напряжение на истоке транзистора ТЗ (выход синхронного фильтра) повторяет напряжение конденсатора СЗ. Следовательно, в момент времени t1 будет справедливо равенство

где τ — период управляющего сигнала.
На интервале времени [t1, t2] интегрируется алгебраическая сумма входного и выходного напряжений, и в момент времени t2 , когда
произойдет очередное замыкание ключа T1, будет справедливо новое равенство
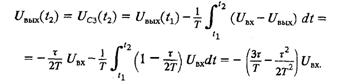
Постоянная времени интегратора равна периоду управляющего сигнала

При этих условиях в момент времени t2 амплитуды входного и выходного сигналов станут равными.
В дальнейшем выходное напряжение меняться не будет, так как прекратится процесс интегрирования ввиду равенства нулю подынтегральной функции.
Особый интерес вызывает многофазный синхронный фильтр, представляющий собой совокупность синхронных фильтров, на вход которых подается одинаковое напряжение, а фазы управляющих сигналов сдвинуты на 2π/n (n — число фаз). Очевидно, что передаточная функция многофазного дискретизатора, определенная как реакция на единичный входной сигнал, имеет вид:

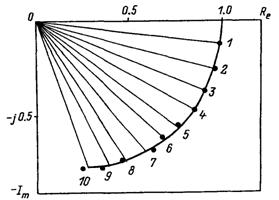
Рис. 4.4. Амплитудно-фазочастотная характеристика
синхронного фильтра.
Точками отмечены результаты эксперимента.
Передаточная функция интегратора, входящего в состав синхронного фильтра, определенная аналогичным образом, может быть записана в виде:

Передаточная функция многофазного синхронного фильтра будет иметь вид:

Сравнение расчетной частотной характеристики СФ с экспериментальной (рис. 4.4) показывает, что они отличаются не более чем на 2 % по амплитуде и 3° по фазе. Это различие можно объяснить разбросом параметров элементов, входящих в схему.
4.3.2. Фазочувствительный выпрямитель
В состав фазочувствительного выпрямителя (ФЧВ) входят операционный блок и четыре транзистора: ТЗ и Т4 работают в ключевом режиме и управляются транзисторами Т1 и Т2 соответственно (рис. 4.5).
При наличии на управляющем входе напряжения отрицательной полярности на базе T1 будет отрицательный потенциал по отношению к эмиттеру. Он открывает транзистор. При этом напряжения затвора и истока ТЗ становятся равными и ключ, собранный на ТЗ, замыкается. Ток по цепи эмиттер—коллектор Т1—R3—R4 вызывает положительное падение напряжения на базе Т2 относительно его эмиттера. Транзистор Т2 открывается, и отрицательный потенциал поступает на затвор Т4. При этом ключ, собранный на Т4, разо-
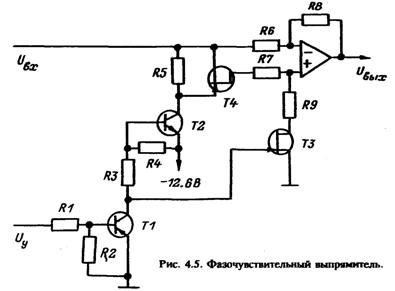
мкнется. Замкнутому ключу ТЗ и разомкнутому Т4 соответствует коэффициент передачи операционного усилителя К = - R8/R6.
Положительное напряжение на управляющем входе запирает транзистор Т1. Напряжение отрицательной полярности через резисторы R4, R3 поступает на затвор ТЗ. Ключ на транзисторе ТЗ размыкается. При отсутствии тока в резисторе R4 напряжения базы и эмиттера Т2 становятся равными; Т2 запирается. Отсутствие тока через него уравнивает потенциалы истока и затвора Т4, и ключ, собранный на нем, замыкается. Разомкнутому ключу ТЗ и замкнутому ключу Т4 соответствует коэффициент передачи операционного усилителя
Номиналы резисторов R8 и R6 выбраны равными. В этом случае:
4.3.3. Управляемый интегратор
Управляемый интегратор (ИНТ) формирует сигнал, пропорциональный величине определенного интеграла входного напряжения на интервале времени между двумя управляющими импульсами. ИНТ собран на операционном усилителе и двух транзисторах (рис. 4.6). Входной сдгнал через сопротивление R3 подается на инвертирующий вход усилителя; управляющее напряжение через R1
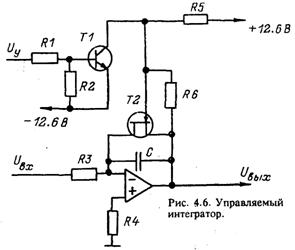
поступает на базу Т1. Сигнал управления положительной полярности, создавая положительное падение напряжения базы Т1 относительно эмиттера, открывает его. Отрицательное напряжение источника питания через эмиттер—коллектор Т1 поступает на затвор Т2, собранного по схеме ключа. Отрицательное напряжение затвора размыкает ключ, и операционный усилитель становится интегратором,
т. е.

При отрицательном напряжении управления Т1 закрывается, и положительное напряжение источника питания через резистор R5 подается на затвор T2. Положительный потенциал затвора T2 замыкает ключ, закорачивая тем самым вход и выход операционного усилителя. В этом случае

Таким образом, в зависимости от полярности управляющего сигнала рассмотренное устройство осуществляет интегрирование входного напряжения или обнуление выходного сигнала.
4.3.4. Быстродействующее запоминающее устройство
В состав быстродействующего запоминающего устройства (БЗУ) входит операционный усилитель и три транзистора (рис. 4.7). На Т2 собран полупроводниковый ключ, который управляется. Т1. Транзистор с изолированным затвором ТЗ работает в режиме исто-кового повторителя и служит для увеличения входного сопротивления операционного усилителя.
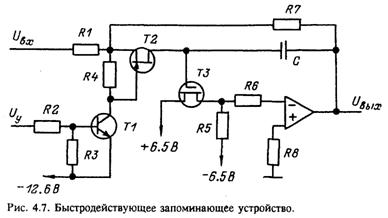
При отрицательном напряжении управления Т1 закрыт и ключ, собранный на Т2, замкнут. Схема становится эквивалентной апериодическому звену первого порядка:

Через промежуток времени, превышающий три постоянных времени, на выходе усилителя установится напряжение, пропорциональное величине входного сигнала.
При поступлении на управляющий вход напряжения положительной полярности полупроводниковый ключ разомкнется. Напряжение выхода усилителя сохранится и не будет меняться при изменении входного сигнала, так как разомкнутый ключ разорвет цепь разряда конденсатора.
4.4. Устройство и работа блоков
регулятора АРВ—СДП1
4.4.1. Блок напряжения
Блок напряжения (БН) формирует аналоговые сигналы, пропорциональные отклонению напряжения статора от заданного значения и первой производной напряжения статора. В его состав входят три компаратора (К1—КЗ), три усилителя (У1—УЗ), три синхронных фильтра (СФ1—СФЗ), интегратор (И) и дифференциатор (Д) (рис. 4.8). На вход поступают синусоидальные напряжения, пропорциональные линейным напряжениям статора, выпрямленное напряжение, среднее значение которого пропорционально среднему значению напряжения статора, а также аналоговые сигналы, формирующие задание. В их число входят: уставка напряжения от БУН и БОР, реактивные токи генератора и группы генераторов от БРТ-1 и
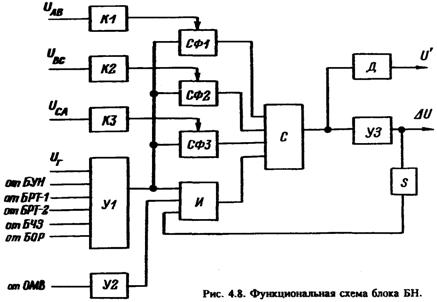
БРТ-2, сигнал, пропорциональный частоте от БЧЗ, а также выходное напряжение блока ОМВ. Сигналы, пропорциональные реактивным токам генератора и группы генераторов, необходимы для создания требуемого статизма регулирования. Сигнал, пропорциональный частоте, служит для снижения величины напряжения статора в режиме выбега. Сигналы БОР и ОМВ осуществляют ограничение возбуждения сверху и снизу соответственно. Сигналы, определяющие задание, поступают на вход усилителя У1, где алгебраически суммируются с сигналом, пропорциональным среднему значению напряжения статора. На выходе У1 образуется сигнал, пропорциональный отклонению напряжения статора от заданной величины.
Синусоидальные сигналы линейных напряжений поступают на входы компараторов и преобразуются в симметричные прямоугольные импульсы управления синхронными фильтрами. На вход синхронных фильтров подается выходное напряжение усилителя У1. Выходные сигналы фильтров, пропорциональные отклонению напряжения, суммируются на сумматоре (С). Кроме выходов синхронных фильтров ко входу сумматора подключен выход интегратора. Входы интегратора подключены к выходам усилителей У1, У 2, УЗ, причем выход УЗ (выход БН) поступает на вход интегратора через делитель S. Таким образом формируется напряжение, определяемое при отсутствии сигнала ОМВ уравнением

где К — коэффициент пропорциональности.
Уравнение сумматора и усилителя УЗ имеет вид:

Решив совместно последние два уравнения, получим:
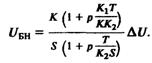
Параметры блока напряжения выбраны таким образом, что К = = К1 = 20 В/е. н., К2 = 1/3, T = 0.044 с.
При положениях переключателя коэффициента усиления сигнала отклонения напряжения «25», «50», «200» значения величии делителя 5 равны 1, 1/2, 1/8 соответственно. Следовательно, при положении переключателя «200»

и осуществляется пропорционально-интегральное регулирование.
При положении переключателя «25»

и обеспечивается пропорциональное регулирование.
Сигнал производной напряжения статора формируется дифференциатором.
4.4.2. Блоки реактивного тока
Блоки реактивного тока (БРТ) формируют аналоговые сигналы, пропорциональные реактивным составляющим тока генератора (БРТ-1) или группы генераторов (БРТ-2). В состав каждого БРТ входят компаратор (К), усилитель (У), фазочувствительный выпрямитель (ФЧВ), два одновибратора (OB1, OB2), быстродействующее запоминающее устройство (БЗУ) и фильтр (Ф) (рис. 4.9). На вход БРТ поступают синусоидальные сигналы, пропорциональные линейному напряжению UAC и фазному току IB :
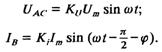
Компаратор преобразует входное синусоидальное напряжение в симметричные прямоугольные импульсы:
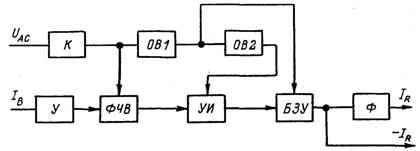
Рис. 4.9. Функциональная схема блока БРТ.

где n = 0, 2, 4, ... — четные числа натурального рада.
Напряжение выхода усилителя, где осуществляется инвертирование синусоидального сигнала фазного тока, подается на фазочувст-вительный выпрямитель. При этом
или


|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
