

Выход ФЧВ поступает на вход управляемого интегратора. В момент времени t= π(n + 1)/ω и напряжение на выходе УИ будет
В момент времени t = π(n + 2)/ω напряжение выхода УИ равно
Таким образом, в моменты перехода линейного напряжения через
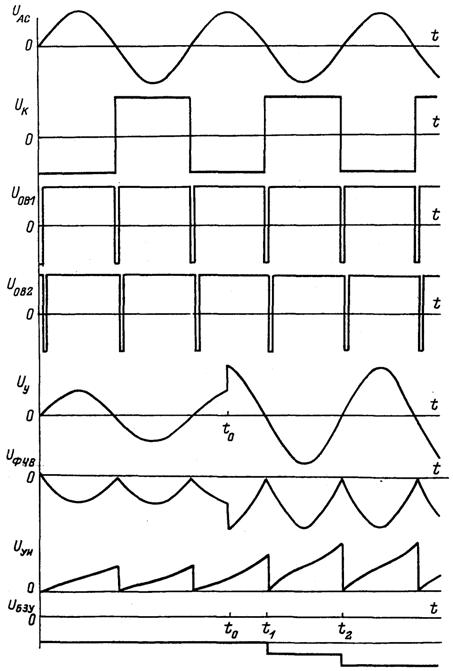
Рис.Временные диаграммы работы блока БРТ.
ноль напряжение на выходе управляемого интегратора будет пропорционально реактивному току. Это фиксируется быстродействующим запоминающим устройством. Рис. 4.10 иллюстрирует работу БРТ при угле сдвига между током и напряжением генератора 90°.
Передаточная функция блока для выхода БЗУ определяется как реакция на скачкообразное изменение входного сигнала в момент времени t0 (рис. 4.10). Она имеет вид

где τ — период напряжения и тока.
4.4.3. Блок частоты и защиты
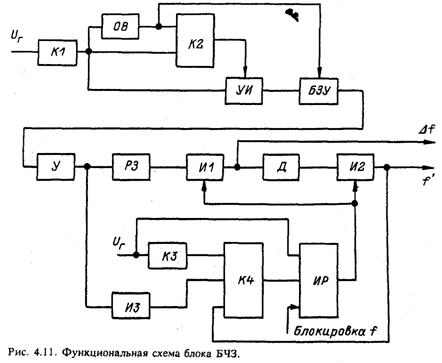
Блок частоты и защиты (БЧЗ) формирует стабилизирующие сигналы отклонения частоты напряжения генератора от установившегося значения и ее первой производной, а также блокирует эти сигналы при аварийном разрыве электропередачи. В него входят: четыре компаратора (KJ—K4), одновибратор (0В), управляемый интегратор (УИ), быстродействующее запоминающее устройство (БЗУ), усилитель (У), разделительное звено (РЗ), три ин-
![]()
![]()
вертора (И1—ИЗ), дифференциатор (Д) и исполнительное реле (ИР) (рис. 4.11).
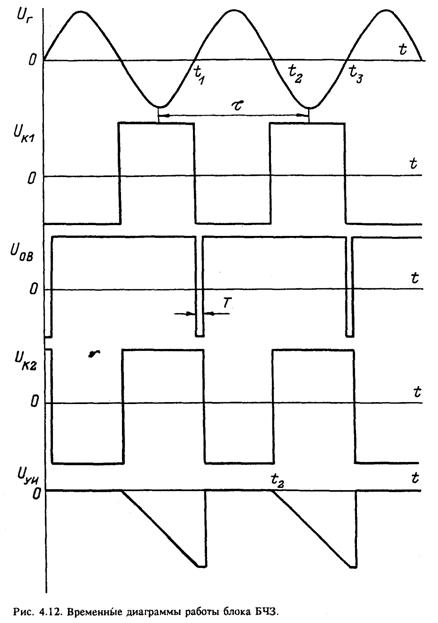
На вход К1 подается синусоидальное напряжение, пропорциональное линейному напряжению генератора, где оно преобразуется в симметричные прямоугольные импульсы (рис. 4.12):

где k = 2n + 1, n = 1, 2, 3, ... — числа натурального ряда.
С выхода компаратора сигнал поступает на входы управляемого интегратора, К2 и одновибратора. Одновибратор в моменты времени tk формирует импульсы отрицательной полярности длительностью Т, управляющие работой БЗУ. К2 формирует прямоугольные импульсы управления интегратором в соответствии с уравнением

В моменты времени tk напряжение на интеграторе будет пропорционально величине определенного интеграла
![]()
![]()
![]()

где τ — период входного напряжения.
Таким образом, в моменты времени tk напряжение интегратора будет пропорционально периоду входного напряжения. В эти моменты БЗУ запоминает его и хранит на интервале [tk, tk+1 ].
Выход БЗУ поступает на вход масштабирующего усилителя, исключающего постоянную составляющую входного напряжения при номинальном значении частоты, тем самым формируя сигнал, пропорциональный отклонению периода входного напряжения от номинального значения.
Поскольку T= 1/f, для малых отклонений от номинальных значений периода ΔTu и частоты Δfu будет справедливо:

Следовательно, напряжение на выходе усилителя будет пропорционально отклонению частоты напряжения генератора от номинального значения. Далее оно проходит последовательно через разделительное звено, инвертор И1, дифференциатор и инвертор И2, формирующий стабилизирующие сигналы по отклонению частоты от установившегося значения Δfu и ее первой производной f'u.
Обрыв электропередачи характеризуется одновременным нарастанием напряжения, частоты и ее производной. При увеличении напряжения статора выше определенной величины срабатывает компаратор КЗ. Если при этом сигналы частоты и ее производной больше заданных значений, то срабатывает компаратор К4, который включает исполнительное реле, блокирующее выходные сигналы БЧЗ.
Все типовые элементы АРВ—СДП1 моделируются соответствующими модулями пакета прикладных программ «Модель», позволяющими получать частотные характеристики и переходные процессы для любой точки схемы при типовых возмущениях (скачок или синусоида) на входе элемента. Благодаря этому возможно:
— обучение персонала;
— получение диаграмм напряжений в любой точке схемы;
— моделирование возможных неисправностей элементов схемы и анализ их влияния.
4.5. Математическая модель
автоматического регулятора возбуждения АРВ—СДП1
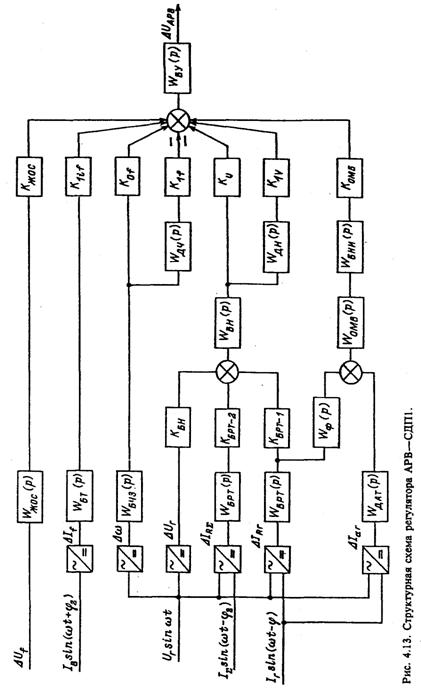
Модель предназначена для анализа качества регулирования синхронных генераторов, оснащенных современными системами возбуждения с регуляторами АРВ—СДП1, и определения запасов устойчивости при их параллельной работе. Исходя из этого ряд блоков и каналов, не оказывающих влияния на устойчивость, исключен из рассмотрения.
Модель представляет собой совокупность передаточных функций узлов и блоков АРВ (рис. 4.13), отражающих динамические свойства регулятора в диапазоне частот колебаний от 0.2 до 5.0 Гц. Физическими входами АРВ являются периодические сигналы измерительных трансформаторов тока и напряжения, пропорциональные напряжению Uг и току Iг статора, току ротора If и суммарному току группы генераторов IΣ. Кроме того, в бесщеточных системах возбуждения от блока обратной связи (БОС) на вход АРВ поступает сигнал напряжения ротора Uf. Измерительные преобразователи формируют на основе входной информации сигналы, которые для малых отклонений можно интерпретировать как изменение напряжения ΔUг, частоты напряжения Δfu, реактивных составляющих тока статора ΔIRг и группы генераторов ΔIRΣ, тока ΔIf и напряжения ΔUf ротора.
Изменение напряжения ΔUг поступает на один из входов блока напряжения (БН), имеющего передаточную функцию

6 ,
где

определена ранее по (4.1)—(4.3).
Параметры передаточной функции БН зависят от положения переключателя коэффициента усиления канала напряжения, расположенного на лицевой панели блока. Эта зависимость отражена в следующих значениях параметров:

Статический коэффициент передачи измерительного преобразователя равен:

На два других входа БН поступают выходные сигналы БРТ-1 и БРТ-2, пропорциональные изменениям реактивных токов генератора ΔURг и группы генераторов ΔIRΣ соответственно. Передаточные функции БРТ-1 и БРТ-2 (4.4) равны:

Величины коэффициентов передачи БРТ-1 и БРТ-2 зависят от положения переключателей «Компенсация», расположенных на лицевых панелях блоков БН и БРТ-2 соответственно. Эти коэффициенты изменяются равными долями от нуля до максимальных значений, соответствующих 10 делениям шкал переключателей:

Знак кбрт-1 зависит от положения накладки переключения режимов работы блока, расположенной на его лицевой панели. Положительный знак соответствует режиму токовой стабилизации, отрицательный — токовой компенсации.
Передаточная функция дифференциатора канала напряжения

Передаточная функция блока частоты

6*
Передаточная функция дифференциатора канала частоты

Передаточная функция канала регулирования по производной тока ротора

Передаточная функция канала жесткой обратной связи

Коэффициент К ЖОС = 0÷1 в зависимости от положения переклю-
чателя «ЖОС», расположенного на лицевой панели блока форсирования (БФ).
Сигналы отклонения и производной напряжения, отклонения и производной частоты напряжения и производной тока ротора суммируются в блоке усиления, имеющем передаточную функцию

Коэффициент усиления блока усиления равен: KБУ = 50 В/В — для статических систем возбуждения; КБУ =115 В/В — для бесщеточных и высокочастотных систем возбуждения. При этом предполагается, что коэффициенты усиления статического и бесщеточного возбудителей составляют соответственно Кст= 0.2 е. в.н./В; Кбщ = 0.8 е. в.н./В.
В результате на выходе АРВ формируется сигнал:

весовые коэффициенты К1u, К0f, К1f, К1if в котором имеют размерность [В/В ]. Они линейно зависят от переключателей коэффициентов усиления каналов регулирования. При положении переключателей, соответствующих 10 делениям шкалы, коэффициенты равны 1. Величина коэффициента Кu всегда постоянна, не зависит от положения переключателей и равна 0.13.
При пользовании моделью следует обратить внимание на то, что все уравнения записаны в именованных единицах и отражают промежуточные переменные постоянными напряжениями в определенном масштабе. Кроме того, уравнение (4.5) учитывает тот факт, что отечественные системы возбуждения традиционно проектируются
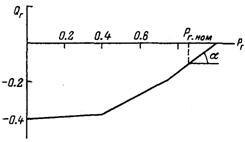
Рис. 4.14. Граница вступления в работу канала ограничения минимального возбуждения.
таким образом, что отрицательное отклонение UАРВ вызывает увеличение напряжения ротора.
В режимах недовозбуждения необходим учет действия ограничителя минимального возбуждения (ОМВ), который осуществляет ограничение минимальной величины реактивного тока в зависимости от текущего значения активной составляющей тока генератора. В ОМВ имеется датчик активного тока статора с передаточной функцией
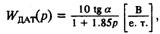
где а — угол наклона границы ограничения относительно оси активной мощности. На рис. 4.14 приведен пример определения этого угла для режима работы генератора при номинальной активной мощности.
Сигнал реактивного тока поступает на вход ОМВ через фильтр, расположенный в БРТ-1 с передаточной функцией
Выходной каскад ОМВ реализует пропорционально-интегральный закон регулирования
В итоге для учета работы ОМВ уравнение (4.5) должно быть дополнено слагаемым

где К, Т определяются в соответствии с положением переключателя К0u, как указано выше (на с. 83); Комв — коэффициент, ли-
нейно зависящий от положения переключателя на лицевой панели блока ОМВ. При 10 делениях шкалы этого переключателя Комв = 1.
Математическая модель регулятора входит составной частью в модуль «Расчет переходных процессов пакета прикладных программ „Модель”» и используется в расчетах статической и динамической устойчивости синхронных генераторов, работающих в энергосистеме.
Для оценочных расчетов устойчивости математическая модель регулятора АРВ—СДП1 может быть значительно упрощена. Известно, что частота собственных электромеханических колебаний ротора большинства синхронных генераторов, работающих в энергосистеме, лежит в пределах от 0.8 до 1.1 Гц. Для данного диапазона частот уравнение регулятора запишется в виде
![]()
![]()

При этом предполагается, что коэффициенты К1u и К1if по-прежнему имеют размерность [В/В], Кf [В/В] = К [В/В], а переключатели коэффициентов стабилизации по отклонению и производной частоты находятся в одинаковом положении, т. е. имеют одинаковое количество делений соответствующих шкал.
Корректность упрощения подтверждается частотными характеристиками каналов регулирования. Передаточные функции канала напряжения по полной и упрощенной моделям следующие:

Передаточные функции канала стабилизации «по частоте» соответственно равны:

где Кf = К0f = К1f.
Для канала стабилизации по производной тока ротора

Сравнение частотных характеристик, вычисленных по (4.7)— (4.12), показывает, что замена полных уравнений математической
модели упрощенными для диапазона частот 0.8—1.1 Гц приводит к погрешности не более чем 2 дБ по амплитуде и 20° по фазе, что вполне допустимо при оценочных расчетах низкочастотных границ устойчивости. Оценка высокочастотных границ устойчивости по упрощенным уравнениям приводит к большой ошибке, поэтому ими нельзя пользоваться для этих целей.
Если выразить коэффициенты усиления в именованных единицах (К0u [е. в.н./е. н. ], К1u [е. в.н./c], К1if [е. т.в./с], kf [е. в.н./Гц]), учесть все знаки в тракте регулирования и коэффициент усиления возбудителя, то обобщенное упрощенное уравнение регулирования запишется в виде

4.6. Четвертая стадия развития
сильного регулирования возбуждения
Бурный прогресс в области полупроводниковой электронной техники, появление интегральных микросхем большой степени интеграции, микропроцессорных комплексов и микропроцессоров положили начало четвертой стадии развития аппаратуры, методов и средств автоматического регулирования возбуждения. Применение микропроцессоров позволяет отказаться от традиционной структуры системы регулирования возбуждения и пересмотреть распределение функций между ее элементами, а также стимулирует поиск новых алгоритмов реализации системных функций, в том числе перестраиваемых, и дает явный выигрыш при реализации технологических и защитных функций за счет повышения точности выполнения. Что же касается функций контроля, диагностики и сервиса, то в этом случае никакой альтернативы микропроцессорам не существует.
Внедрение на электростанциях автоматизированных систем управления технологическими процессами привело к необходимости ввести для регуляторов возбуждения новые технические требования:

в том числе дистанционное управление с центрального пульта (выбор настройки, задание режимов работы); передачу информации о режиме работы на центральный пульт; прием и исполнение команд; самоконтроль и сигнализацию о неисправностях.
В начале 80-х годов были созданы опытные образцы цифровых регуляторов АРВ—СДЦ на базе микроЭВМ «Электроника 60» [51 ] и АРВ—СДМ на базе комплекса микропроцессорных средств управляющей вычислительной техники МСУВТ—В7 [52 ]. Основу цифровых АРВ составляют управляющие вычислительные комплексы повышенной надежности, содержащие две микроЭВМ. Обе они работают одновременно и независимо друг от друга, т. е. каждая получает информацию по своим каналам, обрабатывает ее и рассчитывает управляющее воздействие. На систему управления возбуждением по-
ступает сигнал только от одной машины, ведущей в данный момент регулирование; второй процессор остается в «горячем резерве». Коммутация выходных сигналов микроЭВМ осуществляется блоком контроля исправности.
Цифровые регуляторы возбуждения реализуют значительно большее количество функций по сравнению с их аналоговыми предшественниками. В частности, в алгоритм работы регуляторов возбуждения АРВ—СДЦ и АРВ—СДМ заложено отображение информации о состоянии и режиме работы генератора и элементов системы возбуждения, что значительно облегчает наладку и эксплуатацию.
АРВ—СДМ обеспечивает практически такое же качество регулирования, как и АРВ—СД на магнитных усилителях, который он структурно и алгоритмически повторяет.
АРВ—СДЦ структурно существенно отличается от всех других разработок. Его отличительной особенностью является наличие глу-бокой жесткой отрицательной обратной связи по току возбуждения. Охват возбудителя обратной связью по току ротора в сочетании с ПИД-законом регулирования увеличивает быстродействие системы и обеспечивает увеличение статической точности регулирования. Обратная связь по току ротора явно выделяет в структуре системы регулирования исполнительное звено, получившее название регулятора тока ротора. При этом имеется возможность работы как в режиме регулирования напряжения статора, так и в режиме регулирования тока ротора.
Из-за недостаточно высокой производительности микроЭВМ, на базе которых были созданы регуляторы АРВ—СДЦ и АРВ—СДМ, оказалось невозможным полностью отказаться от узлов и блоков на полупроводниках и микросхемах малой и средней степени интеграции. Большое число аналоговых элементов и используемые микроЭВМ обусловили плохие массогабаритные показатели и высокое энергопотребление. Поэтому АРВ—СДЦ и АРВ—СДМ не получили широкого внедрения. Несмотря на это, разработка цифровых регуляторов была необходимым и полезным шагом на пути создания цифровой аппаратуры управления.
Более перспективным оказалось использование микропроцессорных комплексов в системе управления возбуждением [53 ]. При этом на нее возлагается большая часть защитных и технологических
функций, которые раньше исполнялись регулятором возбуждения. Сохранив функции поддержания напряжения и обеспечения устойчивости генератора, регулятор, получивший название АРН, значительно упростился [54 ]. При его разработке были учтены изложенные в гл. 3 рекомендации о целесообразности дальнейшего уменьшения по сравнению с АРВ—СДП1 пропорциональной составляющей сигнала регулирования по напряжению в области частоты собственных колебаний агрегата. Все это повысило надежность и облегчило наладку и эксплуатацию АРН. Он выпускается в двух модификациях, предназначенных для работы в составе статической тиристорной и бесщеточной систем возбуждения, и уже внедрен на ряде тепловых электростанций.
4.7. Назначение и состав АРН
Автоматический регулятор напряжения (АРН) предназначен для работы в составе тиристорных систем самовозбуждения и бесщеточных систем возбуждения синхронных генераторов малой и средней мощности (от 2.5 до 63 МВт). Он реализует ПИД-закон регулирования напряжения статора генератора с компаундированием по реактивной составляющей тока статора и со стабилизацией по первой производной тока ротора. Совместно с системой возбуждения АРН обеспечивает:
— поддержание напряжения на выводах синхронного генератора в соответствии с заданным статизмом и с заданной точностью;
— устойчивость регулирования во всем диапазоне режимов работы генератора, включая резкопеременные режимы вплоть до набросов нагрузки, вызванных одновременным включением асинхронных двигателей общей мощностью до 30 % номинальной мощности генератора;
— форсирование возбуждения при авариях в энергосистеме, вызывающих снижение напряжения на шинах генератора относительно заданной статической характеристики;
— программное начальное возбуждение синхронного генератора при пуске;
— устойчивое распределение реактивной мощности между однотипными генераторами, объединенными на уровне генераторного на-
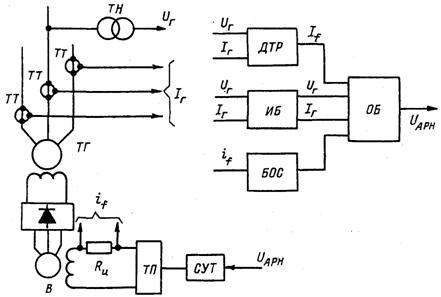
Рис. 4.15. Функциональная схема регулятора АРН.
пряжения, без использования группового регулирования или поперечных уравнительных связей;
— местное и дистанционное изменение уставки регулятора со скоростью 0.5 %/с в диапазоне от 80 до 110 % номинального напряжения генератора;
— ограничение минимального тока возбуждения величиной, не допускающей переход генератора в режим глубокого потребления реактивной мощности;
— независимость напряжения на выводах генератора от частоты в диапазоне от 45 Гц и выше с пропорциональным уменьшением напряжения при снижении частоты ниже 45 Гц.
В состав АРН входят измерительный и операционный блоки. Измерительный блок формирует аналоговые сигналы, пропорциональные напряжению и реактивной составляющей тока статора. Эти сигналы поступают на вход операционного блока, формирующего сигнал управления в соответствии с принятым законом регулирования.
Для бесщеточных систем возбуждения регулятор АРН дополняется датчиком тока ротора и блоком обратной связи (рис. 4.15). Датчик тока ротора, воспроизводящий векторную диаграмму Потье, имеет на выходе аналоговый сигнал, пропорциональный току ротора. Для повышения быстродействия диодной бесщеточной системы возбуждения в АРН предусмотрен сигнал жесткой обратной связи по току возбуждения возбудителя, формируемый блоком обратной связи.
4.8. Устройство и работа блоков АРН
4.8.1. Измерительный блок
Измерительный блок (ИБ) формирует аналоговые сигналы, пропорциональные напряжению и реактивной составляющей тока статора синхронного генератора. В состав ИБ входят три компаратора К1—КЗ, три синхронных фильтра СФ1—СФЗ, сумматор (С), фазочувствительный выпрямитель (ФЧВ) и фильтр (Ф) (рис. 4.16). На вход поступают синусоидальные напряжения, пропорциональные линейным напряжениям статора, синусоидальное напряжение, пропорциональное току статора и выпрямленное напряжение, среднее значение которого пропорционально среднему значению напряжения статора. Линейные напряжения преобразуются в симметричные прямоугольные импульсы. Выходные сигналы компараторов управляют работой синхронных фильтров и фазочувствительного выпрямителя. На вход синхронных фильтров подается выпрямленное напряжение статора. Фильтры подавляют переменную составляющую входного сигнала. Их выходные сигналы синхронно складываются на выходном сумматоре канала измерения напряжения.
На вход фазочувствительного выпрямителя, принцип работы которого рассмотрен выше, поступает синусоидальное напряжение, пропорциональное току фазы В статора. Управляет работой ФЧВ вы-
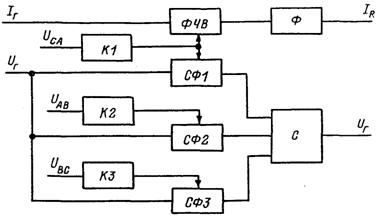
Рис. 4.16. функциональная схема измерительного блока.
ходной сигнал К1, фаза которого совпадает с фазой линейного напряжения фаз UAC. На выходе формируется периодическое напряжение, имеющее постоянную составляющую, пропорциональную реактивному току статора и выделяемую фильтром.
4.8.2. Датчик тока ротора
Датчик тока ротора (ДТР) формирует аналоговый сигнал, пропорциональный току ротора синхронного генератора. Он использует аналоговое моделирование векторной диаграммы Потье, впервые реализованное в устройстве измерения тока ротора [21 ]. Это устройство на пассивных элементах, работающее на переменном токе, имело большие габариты и существенное потребление по цепям измерения, требовало выпрямления и фильтрации выходного напряжения, что приводило к снижению быстродействия. Полупроводниковый ДТР лишен этих недостатков.
На его вход поступают синусоидальные сигналы линейных напряжений и фазных токов статора синхронного генератора. С выхода снимается аналоговый сигнал, пропорциональный току ротора.
В состав датчика входят два фильтра прямой последовательности трехфазных систем напряжений (ФН) и токов (ФТ), два сумматора С1, С2, выпрямитель (В), нелинейный блок (НБ), блок произведения (БП) и частотнозависимый фильтр (Ф) (рис. 4.17).
Фильтр напряжения выделяет линейное напряжение UCA прямой последовательности трехфазной системы линейных напряжений статора. На выходе фильтра токов выделяется напряжение, пропорциональное току фазы В прямой последовательности трехфазной системы фазных токов статора. Выходные напряжения ФН и ФТ век-торно складываются на сумматоре С1. Весовой коэффициент при слагаемом, пропорциональном фазному току, численно равен реак-
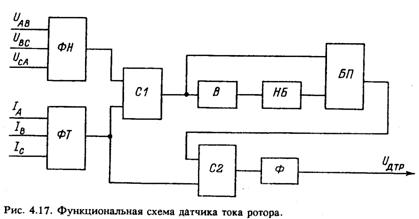
тивному сопротивлению Потье, выраженному в относительных единицах. В результате сложения на выходе С1 формируется напряжение, пропорциональное эдс Еδ, обусловленной потоком в воздушном зазоре генератора, т. е.
Оно поступает на вход нелинейного блока, моделирующего насыщение магнитной цепи. Суть преобразования заключается в формировании кусочно-линейной аппроксимации функции
где f(Uг) — характеристика холостого хода.
После перемножения выходного напряжения нелинейного блока и результирующей эдс на выходе блока произведения формируется сигнал составляющей тока ротора Ifδ, моделирующий результирующую эдс. Напряжение блока произведения на сумматоре С2 векторно складывается с сигналом тока статора. Весовой коэффициент при слагаемом, пропорциональном току статора, численно равен индуктивному сопротивлению реакции якоря, выраженному в относительных единицах. В результате сложения напряжений, пропорциональных составляющей Ifδ и реакции якоря, на выходе С2 формируется периодическое напряжение с амплитудой, пропорциональной току ротора, т. е.

Периодический сигнал с выхода С2 подается на вход частотно-зависимого фильтра, аналогичного блоку БРТ регулятора АРВ—СДП1 (см. разд. 4.4.2). В итоге на выходе фильтра образуется напряжение, пропорциональное току ротора синхронного генератора.
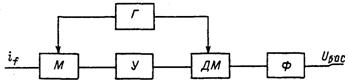
Рис. 4.18. функциональная схема блока обратной связи.
4.8.3. Блок обратной связи
Блок обратной связи (БОС) формирует аналоговый сигнал, пропорциональный току возбуждения возбудителя, для реализации жесткой обратной связи. Кроме того, он осуществляет гальваническую развязку цепей возбудителя и регулятора. В состав БОС входят генератор, модулятор, усилитель, демодулятор и фильтр (рис. 4.18). Генератор формирует прямоугольные импульсы управления модулятором и демодулятором с частотой 10—12 кГц. На вход модулятора с измерительного шунта поступает напряжение, пропорциональное току возбуждений возбудителя. Модулятор формирует периодическое напряжение с амплитудой, пропорциональной входному напряжению. Сигнал на выходе модулятора усиливается по амплитуде усилителем и подается на вход демодулятора, выпрямляющего выходное напряжение усилителя. Выходным каскадом БОС является фильтр, собранный по схеме апериодического звена, подавляющий переменную составляющую сигнала демодулятора.
4.8.4. Операционный блок
Операционный блок (ОБ) формирует сигнал управления возбуждением в соответствии с принятым законом регулирования. В его состав входят устройства формирования уставки (УФУ) и релейного форсирования (УРФ), два сумматора C1, С2, интегратор (И), дифференциаторы напряжения статора (ДН) и тока ротора (ДТ) и выходной усилитель (У) (рис. 4.19). На вход ОБ подаются аналоговые сигналы, пропорциональные напряжению статора, реактивному току статора, току ротора и току возбуждения возбудители, а также дискретные команды на увеличение и уменьшение уставки. УФУ преобразует дискретные команды в аналоговый сигнал уставки напряжения. Этот сигнал поступает на сумматор C1, осуществляющий его алгебраическое сложение с сигналом напряжения статора. В результате на выходе сумматора образуется напряжение, пропорциональное отклонению напряжения статора от заданного значения, которое поступает на C2, И и ДН. Последняя группа функциональных элементов реализует ПИД-закон регулирования напряжения. Ком-паундирование по реактивной составляющей тока статора осуществляется подачей на вход интегратора реактивного тока. Стабилизация
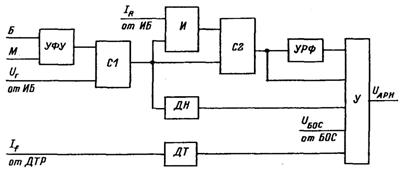
Рис. 4.19. функциональная схема операционного блока.
системы регулирования возбуждения по первой производной тока ротора производится с помощью дифференциатора ДТ. Форсирование возбуждения при авариях в энергосистеме, вызывающих снижение напряжения на шинах генератора, реализует устройство форсирования возбуждения. На его вход поступает напряжение сумматора С2, пропорциональное отклонению напряжения. При уменьшении напряжения генератора относительно заданного значения на определенную настраиваемую величину устройство УРФ выдает сигнал форсировки возбуждения независимо от состояния других каналов. При восстановлении напряжения генератора до заданного значения устройство УРФ снимает сигнал форсировки с задержкой 40—60 мс.
Сигналы С2, дифференциаторов напряжения статора и тока ротора, устройства релейного форсирования и блока обратной связи складываются на усилителе мощности, оснащенном защитой от коротких замыканий в выходных цепях АРН.
4.9. Математическая модель АРН
Математическая модель АРН для исследования вопросов устойчивости синхронных машин представляет собой совокупность передаточных функций каналов регулирования (рис. 4.20). Входными величинами являются отклонения напряжения и реактивной составляющей тока статора, тока ротора и тока возбуждения возбудителя (для бесщеточных систем возбуждения).
Канал измерения напряжения статора блока ИБ представляет собой трехфазный синхронный фильтр, передаточная функция которого определена ранее (4.1—4.3):

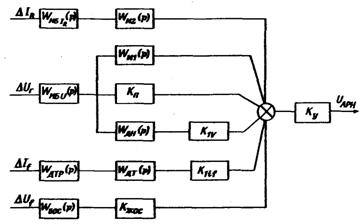
Рис. 4.20. Структурная схема регулятора АРН.
Передаточная функция канала измерения реактивного тока определяется параметрами фильтра, являющегося его выходным каскадом:

Интеграторы каналов регулирования напряжения и реактивного тока имеют передаточные функции:
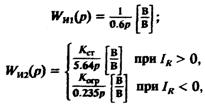
где Kст и Когр — коэффициенты, зависящие от положения переключателей «Статизм» и «Ограничение».
Коэффициент усиления пропорциональной части ПИД-канала регулирования составляет

Передаточные функции дифференциаторов напряжения статора и тока ротора равны:


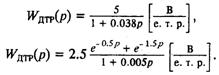
Датчики тока ротора тиристорной и бесщеточной систем возбуждения имеют соответственно передаточные функции:
Передаточная функция блока БОС:
Коэффициент усиления канала ЖОС составляет
Коэффициент выходного суммирующего усилителя АРН
В результате на выходе АРН формируется сигнал, описываемый уравнением

где К1u и К1if — коэффициенты, зависящие от положения переключателей коэффициентов усиления каналов производных напряжения статора и тока ротора. При положении переключателей, соответствующих 10 делениям шкалы, эти коэффициенты равны 1.
Для проведения оценочных расчетов устойчивости математическая модель регулятора АРН может быть значительно упрощена:

Методика упрощения и области применения упрощенной модели были изложены ранее в разд. 4.5.
Г л а в а 5
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СОВРЕМЕННЫХ СИСТЕМ ВОЗБУЖДЕНИЯ СИНХРОННЫХ ГЕНЕРАТОРОВ
5.1. Статические тиристорные системы возбуждения
Математические модели статических тиристорных систем возбуждения для исследования параллельной работы синхронных генераторов достаточно полно описаны в работах [33, 41, 56 ], где ти-ристорный преобразователь моделируется по основной гармонике тока питающей сети и по его внешним характеристикам. При этом силовая часть системы возбуждения рассматривается как мостовой тиристорный преобразователь, в котором коммутирующая эдс Еγ действует за реактивным сопротивлением коммутации Хγ. Современные статические системы возбуждения проектируются таким образом, что в установившихся режимах тиристорный преобразователь работает в режиме горения вентилей 2—3. В этом случае уравнение внешней характеристики тиристорного преобразователя имеет вид

где

После линеаризации

Для независимой системы возбуждения (рис. 5.1,а) коммутирующей эдс является сверхпереходная эдс вспомогательного генератора, а реактивностью коммутации — среднее значение сверхпереходных реактивных сопротивлений по продольной и поперечной осям, т. е.

При наличии автоматического регулирования возбуждения вспомогательного генератора с достаточно большим коэффициентом усиления канала отклонения напряжения можно считать, что

7 , В. А, Кожевников
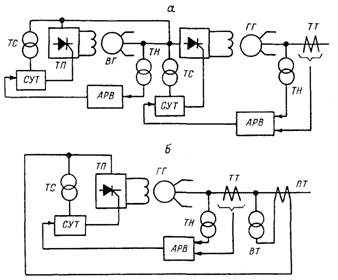
Рис. 5.1. Статические тиристорные системы возбуждения.
а — независимая система возбуждения; 6 — система самовозбуждения. Обозначения: ТП — тиристорный преобразователь; СУТ — система управления тиристорами; ТС — трансформатор синхронизации; АР В — автоматический регулятор возбуждения; ТН — трансформатор напряжения; ТТ — трансформатор тока; ВТ — выпрямительный трансформатор; ПТ — последовательный трансформатор; ВГ — вспомогательный генератор; ГГ — главный генератор.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
