


Министерство сельского хозяйства
Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«ОРЕНБУРГСКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ»
г. Оренбург
ПРОГРАММА ВСТУПИТЕЛЬГО ИСПЫТАНИЯ В МАГИСТРАТУРУ
Направление подготовки | 110800.68 Агроинженерия |
Программы подготовки магистров | Технологии и средства механизации сельского хозяйства |
Электротехнологии и электрооборудование в сельском хозяйстве |
1 Общие положения
Цель проведения вступительных испытаний в магистратуру Оренбургского ГАУ - выявление уровня подготовки абитуриента к учебной и научной работе и определение его возможности осваивать магистерские программы «Технологии и средства механизации сельского хозяйства» и «Электротехнологии и электрооборудование в сельском хозяйстве» по направлению подготовки 110800.68 Агроинженерия.
Форма вступительного испытания – письменный экзамен, соответствующий требованиям подготовки бакалавров по направлению Агроинженерия, оцениваемый по стобалльной шкале. В билет входят два теоретических и одно практическое задание.
Требования к абитуриенту - в ходе экзамена экзаменационная комиссия оценивает:
-знание основ дисциплин из профессионального цикла направления подготовки Агроинженерия (степень-бакалавр);
-способность формулировать ответы на вопросы, связанные с поставленной проблемой;
-степень развития профессиональной мотивации к научно-исследовательской, педагогической деятельности.
2 Содержание программы вступительных испытаний
Раздел 1-Электрические машины
1.Назначение, устройство и принцип действия машин постоянного тока.
2.ЭДС обмотки якоря и электромагнитный момент машины постоянного тока.
3.Генератор постоянного тока с независимым, параллельным и смешанным возбуждением.
4.Назначение, классификация, устройство, принцип действия и область применения трансформаторов.
5.Эксплуатационные показатели трансформатора (изменение напряжения внешние характеристики и коэффициент полезного действия).
6.Схемы и группы соединений трёхфазных трансформаторов, особенности режима холостого хода трёхфазных трансформаторов.
7.Назначение, устройство и принцип действия асинхронных машин.
8.Работа асинхронной машины с заторможенным ротором в режиме фазорегулятора, индукционного регулятора регулируемой реактивной катушки.
9.Назначение, устройство и принцип действия синхронных машин. Системы возбуждения синхронных машин. Холостой ход синхронного генератора.
10.Магнитные потоки статора, ротора и рассеяния при работе синхронного генератора под нагрузкой. Реакция якоря в явнополюсном синхронном генераторе при активной, чисто индуктивной и ёмкостной нагрузках.
Раздел 2 –Электропривод
1.Определение понятия электропривода и его назначение. Состояние, перспективы развития и особенности с. х. электропривода.
2.Характеристики двигателя постоянного тока с параллельным, последовательным и смешанным возбуждением.
3.Рабочие и механическая характеристика асинхронного двигателя. Построение механической характеристики асинхронного двигателя по каталожным данным.
4.Устройство и принцип действия однофазного асинхронного двигателя. Асинхронный конденсаторный двигатель. Работа трёхфазного асинхронного двигателя от однофазной сети.
5.Исторический обзор развития электропривода. Классификация электроприводов.
6.Одномассовая модель взаимодействия электродвигателя и рабочей машины. Основное уравнение движения электропривода. Приведение моментов сопротивления и моментов инерции к валу электродвигателя.
7.Общие понятия о механических характеристиках (определение, виды, жёсткость, крутизна). Механические характеристики рабочих машин.
8.Тормозные режимы электродвигателей.
9.Нагрузочные режимы двигателей (длительный, кратковременный, повторно-кратковременный). Выбор электродвигателя по режиму работы.
10.Общие вопросы нагрева электродвигателей. Уравнения нагрева и охлаждения. Расчёт необходимой мощности электродвигателя по нагреву.
Раздел 3-Автоматика
1.Понятие устойчивости в системах автоматического регулирования. Пути обеспечения устойчивости САР.
2.Структура и элементы систем автоматического регулирования.
3.В чем принципиальное отличие механизации и автоматизации?
4.Основные свойства преобразования Лапласа.
5.В чем отличие автоматической и автоматизированной системы?
6.В чем преимущество решения задачи операторным методом?
7.Критерий устойчивости по Гурвицу. Как составляется определитель Гурвица
8.Критерий устойчивости по Михайлову. Следствия из критерия Михайлова
9.Основные показатели качества регулирования автоматических систем.
10.Как используется структурная схема?
Раздел 4 –Теоретические основы электротехники
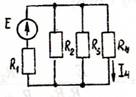
1.Найти токи в ветвях схемы методом пропорциональных величин, если R1=R2=3 Ом; R3=26 Ом; R4=6Ом; R5=4 Ом; R6=8 Ом; E=200B.
 |
 |
2.Определить ток I4, используя принцип взаимности, если R1=R2=R3=18 Ом; R4=2 Ом; E=48 В.
3.Сопротивления RA=8 Ом, RB=14 Ом и RС=10 Ом соединены в звезду. Найти сопротивления эквивалентного треугольника.
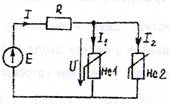
4.Нелинейные сопротивления НС1 и НС2 заданы зависимостями:
![]() и
и ![]() . Определить токи I1 и I2, если R=20 Ом, Е=30В.
. Определить токи I1 и I2, если R=20 Ом, Е=30В.
 |
5.Найти действующие значения тока и напряжения, если их мгновенные значения заданы выражениями:
![]()
![]() 7.05
7.05![]()
6.Два генератора переменного тока соединены последовательно. Их ЭДС соответственно равны: ![]() ; и
; и ![]() . Определить суммарное действующее значение ЭДС и суммарное мгновенное значение в начальный период времени.
. Определить суммарное действующее значение ЭДС и суммарное мгновенное значение в начальный период времени.
7.Параллельно в сеть переменного тока с частотой 50 Гц включена активная проводимость g=20 См и конденсатор ёмкостью С=100 мкФ. Найти активное сопротивление и ёмкость конденсатора эквивалентной последовательной цепи.
8.Последовательно соединены активное сопротивление r=40 Ом, индуктивность L=0,1 Гн и конденсатор С=200 мкФ. Определить волновое сопротивление контура, резонансную частоту, полное сопротивление при резонансе и при частоте равной 0,5 резонансной частоты.
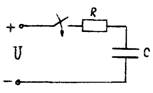 |
9.Определить переходное напряжение на емкости и переходный ток через 1 секунду после подачи напряжения, если С=500 мкФ; R=1000 Ом, а в момент включения конденсатор был полностью разряжен.
10.Напряжение и ток на входе четырёхполюсника 100 В и 8 А соответственно. Определить напряжение и ток на выходе четырёхполюсника, если постоянные четырёхполюсника равны: А=2,2; В=14,8; С=0,2; D=1,8.
Раздел5-Эксплуатация машинно-тракторного парка
1. Классификация МТА. Эксплуатационные свойства МТА. Пути улучшения эксплуатационных свойств агрегатов.
2. Характеристика системы ТО и ремонта МТП. Виды и периодичность технического обслуживания тракторов и СХМ. Особенности системы ТО и ремонта автомобилей.
3. Теоретическая и фактическая производительность машинно-тракторного агрегата. Основные направления повышения производительности МТА.
4. Задачи и значение технической диагностики в системе ТО машин. Классификация видов и периодичность диагностирования тракторов.
5. Тяговое сопротивление машин. Факторы, влияющие на тяговое сопротивление, пути снижения тягового сопротивления машин.
6. Кинематическая характеристика рабочего участка поля трактора, агрегата. Способы движения МТА на загоне.
Раздел 6-Сельскохозяйственные машины
1.Построение направляющей параболы. Графическое определение теоретической длины полевой доски корпуса плуга.
2.Способы определения коэффициентов трения сельскохозяйственных материалов.
3. Фазы совместной работы режущего аппарата и мотовила. Влияние кинематического режима и выноса мотовила на фазы и коэффициент полезности мотовила.
4. Типы молотильных аппаратов и их сравнительная оценка. Устройство, работа и регулировки молотильного аппарата на примере комбайна «Дон-1500». Расход мощности на обмолот.
5. Общее устройство и рабочий процесс клавишного соломотряса. Закономерности выделения зерна из соломы, определение длины соломотряса. Кинематический режим работы.
6. Аэродинамические свойства семян с.-х. культур и сорных примесей. Схемы воздушных очисток. Характеристика воздушной сети зерноочистительной машины. Способы регулирования воздушных систем.
Раздел 7-Тракторы и автомобили
1.Кинематика поворота гусеничного трактора.
2.Кинематика поворота колесного трактора.
3.Мощностной баланс трактора.
4.Общая динамика гусеничного трактора.
5.Индикаторные показатели работы двигателя. Индикаторная мощность, среднее индикаторное давление, индикаторный удельный расход топлива, индикаторный кпд.
6.Уравновешенность и уравновешивание поршневых ДВС. Влияние на уравновешенность конструктивного фактора.
Раздел 8-Механизация животноводства
1.Структура и производственно-техническая характеристика животноводческих предприятий, ферм, комплексов, фабрик.
2.Базовые технологии, технологические регистры и технологические адаптеры при производстве продукции животноводства и птицеводства.
3.Федеральный реестр техники для животноводства и кормопроизводства: структура, содержание, количественно-качественные характеристики машин и оборудования.
4.Методика разработки и расчета основных показателей функционирование поточных технологических линий: приготовления и раздачи кормов, доения коров, стрижки овец, удаления навоза (помета), первичной обработки и частичной переработки молока.
5.Энергетические потоки в животноводстве и основные направления сокращения энергоемкости производства продукции животноводства.
6.Технологические процессы и основные схемы поточных линий (ПТЛ).
Раздел 9-Надежность и ремонт машин
1. Понятие о качестве и надежности машин
2. Критерии и методы обоснования предельного состояния деталей «вал - подшипник».
3. Понятие о производственном и технологическом процессах. Общая схема технологического процесса ремонта машин.
4. Классификация способов очистки деталей машин.
5. Сущность и особенности применения плазменной наплавки для восстановления изношенных поверхностей деталей.
6. Восстановление деталей электролитическим осаждением металлов.
Раздел 10-Теоретическая механика
1.Дана система трех пар, действующих во взаимно перпендикулярных плоскостях, моменты которых численно равны:  ,
,  ,
,  .
. 
Чему равен момент результирующей пары?
2.На балку АС действуют распределенная нагрузка интенсивностью qmax = 2,5 Н/м и пары сил с моментами М1 = 4 Нм и М2 = 2 Нм. Определить реакцию опоры В, если длина АВ = 4 м, ВС = 0,5 АВ
 .
.
3.Однородная балка АВ, вес которой равен 4 кН, в точке В свободно опирается на горизонтальный стержень СД. Определить в кН реакцию подвижного цилиндрического шарнира D, если размеры ВС = ВД. Весом стержня CD пренебречь.
.
4.Однородная горизонтальная балка АВ, вес которой 3 кН, в точке В свободно опирается на балку СD. Определить в кН силу воздействия балки CD на основание в точке D, если расстояние BD = ВС, угол ![]() = 600. Весом балки CD пренебречь
= 600. Весом балки CD пренебречь
.
5.К однородному катку радиуса R = 0,4 м приложена горизонтальная сила F = 12 Н. Каким должен быть наименьший вес катка в кН, для того чтобы он находился в покое, если коэффициент трения качения ![]() =0,008 м, размер ОА = 0,2 м
=0,008 м, размер ОА = 0,2 м
 ?
?
6.Положение кривошипа определяется углом ![]() = 0,5 t. Определить скорость ползуна В в момент времени t = 4 с, если ОА = АВ = 1,5 м
= 0,5 t. Определить скорость ползуна В в момент времени t = 4 с, если ОА = АВ = 1,5 м
 .
.
7.Дано уравнение движения точки ![]() . Определить скорость в ближайший после начала движения момент времени t, когда координата х = 0,5 м.
. Определить скорость в ближайший после начала движения момент времени t, когда координата х = 0,5 м.
8.Определить ускорение точки В в момент времени t = 5 с, если длина кривошипа ОА = 15 см, а закон изменения угла = 4 t
9.Задан закон движения точки в прямоугольной системе координат: х = 2 sin t, у = 2 cos t. Определить криволинейную координату S точки в момент времени t = 5 с, если при to = О So = О и точка движется в положительном направлении координаты S.
10.Скорость точки в декартовых координатах задана выражением  . Определить касательное ускорение точки в момент времени t = 2 с.
. Определить касательное ускорение точки в момент времени t = 2 с.
11.Чему равно количество движения кривошипно-шатунного механизма в заданном положении, если ОА=r; массы звеньев ОА, АВ и ползуна В соответственно равны m1, m2, m3; ОА и АВ – однородные стержни, а угловая скорость кривошипа ОА равна ω1?
12.Два груза, массы которых m2=m1=2кг, соединены между собой нитью, переброшенной через блок 2, массой которого можно пренебречь. Определить ускорение грузов, если коэффициент трения скольжения между грузом 1 и плоскостью f=0,1
 .
.
13.Определить отношение между возможными перемещениями δsА и δsВ точек А и В шатуна АВ шарнирного четырехзвенника
 .
.
14.К диску, который вращается вокруг оси О, прижимаются две тормозные колодки с силами F1 = F2 = 100 Н. Вычислить работу сил трения скольжения при торможении диска радиуса r = 0,1 м за 10 оборотов. Коэффициент трения скольжения тормозной колодки о диск f = 0,3
 .
.
15.Материальная точка массой m=1,6кг движется из состояния покоя в горизонтальной плоскости по окружности радиуса R=12м под действием силы F=0,2t. Определить скорость точки в момент времени t=18с, если сила образует постоянный угол 250 с вектором скорости
 .
.
16.Одинаковые блоки 1 и 2 массой m1 = m2 и радиусами R1 = R2, представляющие собой однородные диски, начинают движение из состояния покоя под действием силы тяжести. Определить скорость центра С блока 1 после того, как он опустился вниз на расстояние s = 1 м.
3 Список рекомендуемой литературы
К разделу 1:
1.Сукманов машины и аппараты.-М:. Колос, 2001.-296с.: ил.-(Учебники и учебные пособия для студентов средних специальных учебных заведений).
2., и др. Технические средства автоматики и телемеханики. – М.: Агропромиздат, 1992.
3., Рысс технологических процессов. – М.: Колос, 1996.
К разделу 2:
1.Шичков привод. – М.: КолосС, 2006.
2., Сабинин электропривода. – С. Пб.: Энергоиздат Санкт-Петербургское отделение, 2000.
3., Козаченко Общий курс электропривода. – М.: Энергоатомиздат, 1992.
К разделу 3:
1. и др. Автоматика и автоматизация производственных про - цессов. М.: Агропромиздат, 1989 г.
2., Рысс технологических процессов. – М.: Агропромиздат, 2001г.
3., и др. Средства автоматики и телемеханики. – М.: Агропромиздат, 2002.
4.Попов линейных систем автоматического регулирования и управ - ления. М.: Наука, 1999 г.
5., Кириллин задач по ТАУ. М.: Агропромиздат, 1999
К разделу 4:
1., , Редько основы электротехники. – М.: УМЦ «Триада», 2005.
2.Бессонов основы электротехники. Электрические цепи. – М: Гардарики, 1999.
3.Бессонов основы электротехники. Электромагнитное поле. – М: Гардарики, 2000.
4., Демирчан основы электротехники. Т.1. – Л.: Энергоиздат, 1981.
5., Демирчан основы электротехники. Т.2. – Л.: Энергоиздат, 1981.
К разделу 5:
1., , Скороходов эксплуатация машинно-тракторного парка. – М.: Колос,1996.
2., , Михлин эксплуатация машинно-тракторного парка. – М.: Агропромиздат,1991.
3., , и др. Диагностика и техническое обслуживание машин. – М:. Изд. Центр «Академия, 2008»
4.Плаксин мобильных агрегатов в растениеводстве. УОП ЧГАУ Челябинск, 2005.
К разделу 6
1. и др. Сельскохозяйственные и машины. - М.: Колос, 2008.
2. Спицын техника и технологии. –М.: Колос, 2006
3.Карпов послеуборочной обработки и хранения зерна. – М.: Агропромиздат, 1994.
4. и др. Комбинированные почвообрабатывающие и посевные агрегаты и машины. М.: Россельхозиздат, 1984.
К разделу 7:
1.Кутьков и автомобили: Теория и технологические свойства. – М.: КолосС, 2004. -504 с.
2.Наземные тягово-транспортные системы. Энциклопедия. Ред. Совет: (пред) и др. М.: Машиностроение. Наземные тягово-транспортные системы. Том 1/ , , . Под ред. , 2003- 743 с.; ил.
3.Основы эргономики и дизайна автомобилей и тракторов: Учебник для студ. Высш. Учеб. Заведений /, , и др.; Под общ. ред. . – М.; Издательский центр «Академия», 2005. – 256 с.
К разделу 8:
1.Мирзоянц, практикум по технологиям и техническим средствам в сельском хозяйстве. Ч 1, Ч2/, , . – Кострома: КГСХА, 2010. – 230 с.
2. и др. Лабораторный практикум по механизации и технологии животноводства. – Великие Луки: Великолукская ГСХА 2003.
3.Современные технологии и технические и технические средства для животноводства. – М.: ФГНУ «Росинформагротех». E-mail: *****@***ru.
4. и др. Блочно-модульные принципы создания сельскохозяйственной техники. М.: «Колос», 2007.
К разделу 9:
, , Бондарева надежности машин: Учебное пособие для вузов. – Часть I – М.: Издательство, 2007. – 224 с. – Часть II – М.: Издательство, 2007. – 260с.
, ,, Шахов по основам надежности сельскохозяйственной техники / Под ред. – Оренбург: Издательский центр ОГАУ, 2000. – 76с. (Учебники и учебные пособия для высших учебных заведений).
, ,, , и др. Практикум по ремонту сельскохозяйственных машин / Под ред. . – М.: Колос, 2007. – 336 с. (Учебники и учебные пособия для высших сельскохозяйственных учебных заведений).
и др. Технология ремонта машин и оборудования. – М.: Колос, 1975. – 560с.
и др. Надёжность и ремонт машин. – М.: Колос.2000.
К разделу 10:
1., Никифорова теоретической механики. . М., Высшая школа, 2004.
2., Никифорова заданий для курсовых работ по теоретической механике. . М., Высшая школа, 2002.
3.Тарг курс теоретической механики. М., Высшая школа, 2000.
4., , Меркин теоретической механики. Т. 1,2. М., Наука, 1988.
5.Никитин теоретической механики. М., Высшая школа, 1999.
