



Качество технологического процесса намотки зависит от эффективности взаимосвязанного функционального управления электроприводами, что требует синтеза автоматического регулятора, обеспечивающего стабилизацию линейных скоростей V1(t), V2(t) и длины ![]() обрабатываемого материала в соответствии с их заданными (желаемыми) значениями (V*,
обрабатываемого материала в соответствии с их заданными (желаемыми) значениями (V*, ![]() ), т. е.
), т. е.
![]()
 (25)
(25)
Задача синтеза САУ для рассматриваемого технологического объекта заключается в определении управляющих воздействий u1(t) и u2(t), обеспечивающих заданный алгоритм функционирования (25) и требуемое быстродействие (![]() ,
, ![]() ) проектируемой автоматической системы.
) проектируемой автоматической системы.
Для синтеза искомого алгоритма управления использован метод динамического проектирования регулятора с переменной структурой, предложенный в главе 3. Вначале построена математическая модель объекта управления, которая в матричной форме имеет вид (10). При этом вектор состояния
 а вектор управляющих воздействий
а вектор управляющих воздействий ![]() , где
, где ![]() ,
, ![]() ,
, ![]() - ошибки управления, т. е. отклонения переменных V1(t), V2(t),
- ошибки управления, т. е. отклонения переменных V1(t), V2(t), ![]() от их желаемых значений V*,
от их желаемых значений V*, ![]() соответственно. Матрицы объекта управления:
соответственно. Матрицы объекта управления:

где

Здесь r(t) – радиус приемной катушки; J2(t) – момент инерции, приведенный к валу Дв2 .
Закон управления u(t) с обратной связью имеет вид:
![]()
где матрица регулятора 
В соответствии с методикой построения регулятора синтезирован искомый закон управления u(t), компоненты которого имеют вид:
 (26)
(26)
где элементы матрицы S(t):
![]()
![]()
В целях определения качества и эффективности спроектированной САУ, проведено ее компьютерное моделирование с использованием программной системы MATLAB/Simulink. Моделирование выполнено при следующих параметрах технологического объекта:

где ![]() - момент вращения Дв1;
- момент вращения Дв1; ![]()
![]() ,
, ![]() ,
, ![]() - коэффициенты, характеризующие моменты вращения и сопротивления соответственно.
- коэффициенты, характеризующие моменты вращения и сопротивления соответственно.
Требования к проектируемой САУ определены следующим образом:
![]()
Параметры синтезированного закона управления u(t) имеют следующие значения:
![]()
![]()
![]()
![]()
Результаты компьютерного моделирования при различных начальных условиях показаны на рис. 5-6.
|
|
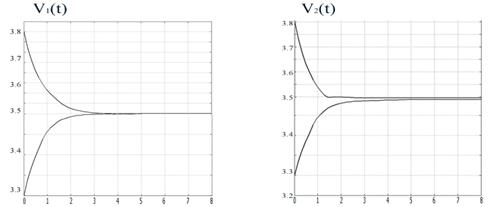
Рис.5. Динамика управляемых переменных V1(t) и V2(t).
|
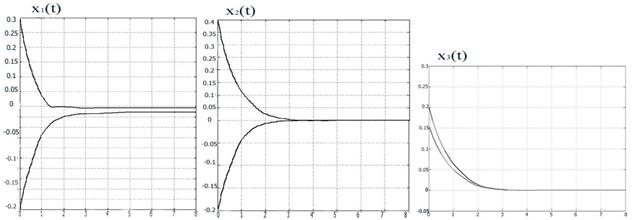
Рис.6. Ошибки управления xi(t), i=1,2,3.
Анализ результатов моделирования показывает, что синтезированный алгоритм (закон) управления, определяемый формулами (26), обеспечивает заданные инженерные требования к проектируемой САУ.
В работе также выполнены расчеты по динамическому проектированию САУ температурным режимом процесса выращивания поликристаллического кремния и технологического резервуара, предназначенного для получения смеси с заданной концентрацией.
ВЫВОДЫ
В диссертационной работе выполнены исследования, направленные на создание алгоритмов автоматического управления многомерными технологическими объектами на основе принципа гарантируемой динамики. В соответствии с этим принципом для оценки качества процессов управления используются инженерные показатели качества, такие как: быстродействие и точность проектируемых систем управления. Процедура синтеза САУ осуществляется в условиях полной и неполной информации с использованием функциональных соотношений, определяющих условия достижения целей управления при заданных требованиях к качеству переходных процессов.
В диссертационной работе получены следующие основные научные результаты:
1) предложена общая методология синтеза САУ на основе принципа гарантируемой динамики;
2) разработан алгоритм робастного управления для линейной многомерной стационарной САУ с учетом ограничений на управление по инженерным показателям качества;
3) разработан алгоритм синтеза регуляторов САУ с переменной структурой для линейных многомерных нестационарных объектов;
4) предложен алгоритм синтеза динамического регулятора для линейной стационарной системы управления;
5) разработана процедура построения идентификаторов состояний линейных многомерных САУ.
Основные свойства предложенных алгоритмов автоматического управления заключаются в том, что они обеспечивают гарантированные результаты по достижению заданных инженерных требований к проектируемым САУ.
На основе разработанных алгоритмов, выполнен синтез САУ взаимосвязанными электроприводами, выполняющую функцию намотки длинномерных материалов, а также динамический расчет параметров регуляторов системы управления температурным режимом процесса выращивания поликристаллического кремния и технологического резервуара, предназначенного для получения смеси с заданной концентрацией. Компьютерное моделирование синтезированных автоматических систем показало их достаточно высокую эффективность. Результаты исследований использованы в ОсОО «Деском» и учебном процессе Кыргызского государственного технического университета им. И. Раззакова.
СПИСОК ОПУБЛИКОВАННЫХ РАБОТ ПО ТЕМЕ ДИССЕРТАЦИИ:
1. К проектированию цифрового регулятора многомерной системы в условиях неполной информации [Текст]/ , , и др. // Известия ОшТУ, 2010, №2, -С. 206-212.
2. Синтез автоматического регулятора для нелинейных систем c учётом инженерных показателей качества [Текст]/ , , и др.// Вестник ОшГУ, 2011, №1, - С. 58-69.
3. К динамическому проектированию робастного управляющего устройства для линейных автоматических систем [Текст]/ , , и др // Ташкент: Международный научно-технический журнал «Химическая технология, контроля и управления», № 3 (39), 2011, - С.53-57.
4. Разработка математической модели гидроагрегата [Текст]/ // Известия ОшТУ, 2011, №2, - С. 24-33.
5. Моделирование процессов гидрогенератора [Текст]/ // Известия ОшТУ, 2011, №2, - С. 37-44.
6. Робастное управление для линейных многомерных автоматических систем [Текст]/ // Вестник КНУ им. Жусуп Баласагына, Выпуск 2, 2012, - С. 27-33.
7. Метод синтеза автоматических регуляторов для нестационарных линейных многомерных систем [Текст]/ , , // Известия НАН КР. Бишкек: Илим, 2012, №3, - С.90-93.
8. Проектирование наблюдающих устройств линейных многомерных нестационарных объектов управления [Текст]/ , , // Интернет-журнал, ВАК КР, выпуск 2, 2012, http://nakkr. org:81/jurnal/
9. Cинтез динамической управляющей подсистемы для стационарного многомерного объекта [Текст]/ , // XII Международная заочная научно-практическая конференция «Технические науки - от теории к практике». Россия, г. Новосибирск, 2012 г. - С. 27-33.
10. Идентификация состояний нестационарных объектов в информационных системах управления [Текст]/ , , // VІ Міжнародна науково-практична конференція “Сучасні проблеми і досягнення в галузі радіотехніки, телекомунікацій та інформаційних технологій”, Украина, г. Запорожье, 2012, http://rtt. zntu. /data/Tezy_ZNTU_2012.pdf, - С.189-192.
11. Синтез робастной многомерной управляющей подсистемы с учетом ограничений на управление [Текст]/ , // Вестник КГТУ им. И.Раззакова, №27, 2012, - С.158-164.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
