



Следующий элемент, характеризующий поворотливость судна — период циркуляции. Это время, за которое судно поворачивается на 360 °. Он зависит от скорости судна и угла перекладки руля. С увеличением скорости и угла перекладки руля период циркуляции уменьшается. При перекладке руля в первоначальный момент появляется крен судна в сторону поворота. Он исчезает в начале движения на циркуляции и при дальнейшем движении судно получает крен в обратную сторону поворота. Это объясняется тем, что вначале на судно действует кренящий момент М'кр, возникающий от силы Р — давления воды на перо руля и силы R бокового сопротивления (рис. 164). При дальнейшем повороте судна на него начинают действовать центробежная сила инерции К, приложенная к центру тяжести судна (G) и направленная во внешнюю сторону поворота, и сила бокового сопротивления R. Эти две силы образуют момент М'кр, значительно больший, чем М'кр, который кренит судно на борт, противоположный переложенному рулю (противоположную сторону поворота). Вышеизложенное объяснение упрощено. В действительности распределение сил во время поворота сложнее.
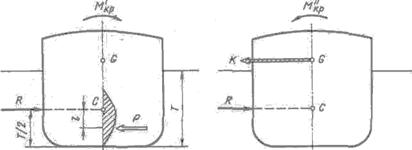
Действие сил на циркуляции
Определение элементов циркуляции
Определение элементов циркуляции можно производить многими способами: с помощью РЛС, фазовых РНС, плавающих объектов, на створах, по двум горизонтальным углам, по пеленгу и вертикальному углу и т. д.
Элементы циркуляции определяют опытным путем для основных режимов главного двигателя (полный, средний, малый, самый малый), при развороте через левый и правый борт, в балласте и в полном грузу.
Для этого руль перекладывают на левый или правый борт (на 10°, 20°, 30°), через каждые 20—30 с определяют место судна на циркуляции, замечают курсы и крен, затем на планшете или карте крупного масштаба по данным наблюдений наносят места судна и соединяют их плавной кривой.
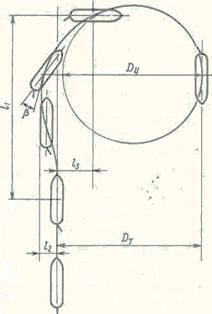
Элементы движения судна на циркуляции:
dt — тактический диаметр циркуляции; Дц — диаметр установившейся циркуляции; l1 — выдвиг — расстояние между положениями центра тяжести судна в начальный момент циркуляции и после поворота на 90°:
ll—(0,6—1,2); l2—обратное смещение; l3—прямое смещение — расстояние от линии первоначального курса до центра тяжести судна после поворота на 90°: /3= (0,4—0,6): B—угол дрейфа
3. Радиопеленгатор «Рыбка». Пеленгование, определение стороны.
Билет № 7
1. Меридианальные части и разность меридианальных частей. Различия между разностью широт и разностью меридианальных частей.
Меридианальная часть – расстояние на меркаторской проекции между двумя параллелями, выраженное в экваториальных милях.
Разность меридианальных частей(РМЧ) – расстояние по мередиану по меркаторской проекции между 2-мя параллелями, выраженное в экваториальных милях.
РМЧ=МЧ2-МЧ1
Если на поверхности Земли 1' дуги меридиана (1м. м.) – величина постоянная, то на меридиане проекции(Меркатор) 1 м. м. ( 1минута дуги меридиана) изображается различными по дуге отрезками меридиана, в зависимости от широты, т. е. величина переменная.
Перевод морских миль в экваториальные можно осуществить с помощью табл.26 МТ-75.
Разность широт и разность меридианальных частей – совершенно различные величины. Если разность широт – это угловая величина, которая обозначает угол в градусах, то разность меридианальных частей – это линейная величина, которая обозначает расстояние по поверхности Земли, выраженное в абсолютной величине – в экваториальных милях в отличие от морской мили, величина которой относительна и зависит от широты.
2. Условия остойчивости. Метацентрическая формула остойчивости.
3. Рекомендации судоводителям при пеленговании.
Билет № 8
1. Сущность графического счисления, элементы счисления и их характеристика. Навигационная прокладка, принципы и правила ее ведения.
ГРАФИЧЕСКОЕ И АНАЛИТИЧЕСКОЕ СЧИСЛЕНИЕ ПУТИ СУДНА
Важнейшее условие решения задач судовождения и обеспечения безопасности плавания — непрерывное и тщательное нанесение на карту пути перемещения судна, чтобы в любой момент знать место судна и иметь возможность ориентироваться по карте в навигационной обстановке, окружающей судно. Это достигается ведением счисления пути судна.
Счисление — это учет перемещения судна с целью знания его места в любой заданный момент. Счисление ведется по элементам движения судна — по курсу, скорости и времени. Оно должно быть непрерывным, наглядным, точным и обеспечивать быстроту получения места.
На перемещение судна в море могут влиять ветер, создающий дрейф судна, и течения, вызывающие снос.
Счисление может быть графическим и аналитическим. При графическом счислении с помощью прокладочного инструмента на карту наносят истинный курс судна, и по нему откладывают пройденное судном расстояние. Кроме этого, делают и другие построения, позволяющие учесть влияние на перемещение судна ветра и течения.
При аналитическом (письменном) счислении рассчитывают координаты судна на определенный момент по специальным формулам.
Графическое счисление является основным, так как оно наиболее полно удовлетворяет требованиям, предъявляемым к счислению. Недостатком его является зависимость точности счисления от масштаба карты, на которой оно ведется.
Недостаток аналитического счисления—отсутствие непрерывности и наглядности.
Место судна, рассчитанное с помощью счисления, называется счислимым местом.
Для получения счислимого места судна необходимо знать истинный курс и пройденное расстояние.
Графическое счисление выполняют следующим образом. На морской навигационной карте по соответствующим координатам наносится точка, из которой прокладывается истинный курс. У начальной точки записываются время и отсчет лага — Т1 и ОЛ1 Чтобы найти место судна в последующий момент Т2 при отсчете лага ОЛ2, надлежит по линии истинного курса от исходной точки отложить расстояние, пройденное судном за время Т2—Т1. Пройденное расстояние рассчитывается с точностью до 0,1 мили.
Рис. 34. Графическое счисление
Расстояние по лагу
Sл= Kл(ОЛ2-ОЛ1).
Счислимое место судна на карте обозначают небольшой черточкой, пересекающей линию курса. Вблизи ее пишется дробью момент по часам и отсчет лага.
Дробную черту проводят горизонтально с помощью линейки. Вдоль линии курса записывают значение компасного курса с учетом поправки компаса, которую указывают в скобках (рис. 34).
2. Диаграмма статической остойчивости и задачи, решаемые с её помощью.
3. Функциональная схема РЛС.
Билет № 9
1. Графическое счисление при наличии дрейфа судна. Угол дрейфа судна, приписываемые ему знаки и способы его определения.
ЯВЛЕНИЕ ДРЕЙФА, ОПРЕДЕЛЕНИЕ УГЛА ДРЕЙФА
Ветер воздействует на надводную часть корпуса судна, на его надстройки и палубные устройства с некоторой силой, отклоняющей судно с линии курса.
Аэродинамическая сила Р (рис. 41), обычно не совпадающая по направлению с ветром, действующим под курсовым углом q(w) может быть разложена на две составляющие: продольную p1 и поперечную Р2. Сила P1 вызывает изменение скорости судна, а сила Р2—дрейф (отклонение от направления ИК на некоторый угол).
Линия АВ, по которой перемещается судно относительно воды под действием ветра, называется линией пути, а угол ПУα, заключенный между плоскостью истинного меридиана и линией пути, называется путевым углом или путем. Путевой угол отсчитывается от 0° до 360° по часовой стрелке.
Угол α, заключенный между линией истинного курса и линией пути на дрейфе, называется углом дрейфа.
Если ветер направлен в левый борт судна, то угол дрейфа считается положительным (+); если ветер воздействует на судно с правого борта, угол дрейфа а считается отрицательным (—), т. е.
ПУα=ИК + ( ±α)
ИК==ПУα – α
α = ПУα - ИК
Следует помнить, что, перемещаясь по линии пути, диаметральная плоскость судна сохраняет свое направление относительно истинного курса.
Рис. 41. Дрейф судна
Угол дрейфа зависит от курсового угла и силы кажущегося ветра, скорости хода судна, от парусности надводной части судна и от его осадки.
Для определения пути судна с учетом дрейфа необходимо знать значение угла дрейфа α. Оно может быть определено различными способами. В основе всех способов лежит метод сравнения действительного пути судна ПУα с истинным курсом ИК. При следовании судна вдоль побережья действительную линию пути судна можно определить с помощью обсерваций. Определив 3—4 раза место судна, соединяют прямой полученные обсервации. Эта прямая и будет линией действительного перемещения судна—линией пути. Сняв с карты направление линии пути судна, легко рассчитать угол дрейфа:
α=ПУα – ИК.
При этом следует помнить, что рассчитанный угол дрейфа может совпадать с действительным, если только в данном районе плавания нет течения. При плавании вне видимости берегов угол дрейфа можно определить по кильватерной струе. Кильватерная струя даже при ветре почти не изменяет своего направления, и ее направление можно принять за линию пути. Поэтому угол между диаметральной плоскостью судна и направлением кильватерной струи будет углом дрейфа α. С помощью компаса, расположенного как можно ближе к корме, определяют курсовой угол кильватерной струи. Определив курсовой угол кильватерной струи, рассчитывают угол дрейфа:
α=КУ-180°.
При пеленговании кильватерной струи угол дрейфа рассчитывают по формуле
α=ОКП-КК.
РАСЧЕТ ПУТИ И КУРСА СУДНА С УЧЕТОМ ДРЕЙФА
При ведении прокладки с учетом дрейфа на карте прокладывают истинный курс и линию пути. Обычно при прокладке решают две задачи: прямую и обратную.
Решение прямой задачи. В этом случае дан истинный курс, угол дрейфа и направление ветра. Требуется определить путевой угол ПУα
ГКК
+ΔГК
ИК
- α
ПУα
Решение обратной задачи. В этом случае на карте прокладывают желаемый путь судна и снимают Значение ПУα. Известен угол дрейфа и направление дрейфа. Определить истинный курс ИК.
Решение. Вычисление производят по следующей схеме:
ПУα
- α
ИК
-ΔГК
ГКК
После соответствующих расчетов на карте прокладывают только линию пути судна, надписывая на ней компасный курс, поправку компаса и принимаемое к учету значение дрейфа α со своим знаком.
Рис. 42. Графическое решение прямой задачи Рис. 43. Графическое решение обратной задачи
Последнюю запись делают в виде равенства, например α = +5,0°.
Для наглядности положения диаметральной плоскости судна линию ИК, можно показать в виде стрелки длиной 2—3 см, проведенной из точки, в которой был начат учет дрейфа.
Пройденное судном расстояние откладывают только по линии пути при дрейфе.
Точкой траверза ориентира будет пересечение траверзного пеленга ИП![]() с линией пути.
с линией пути.
Существующие методы определения дрейфа не позволяют положиться на достоверность их результатов. Поэтому следует по возможности чаще определять место судна и контролировать учитываемый дрейф.
2. Классификация ходов судна и соотношение эффективности переднего и заднего хода.
3. Эпюры напряжений и токов, поясняющие работу РЛС – временные диаграммы.
Билет № 10
1. Графическое счисление с учетом течения. Угол сноса, приписываемые ему знаки. Решение прямой и обратной задачи.
КЛАССИФИКАЦИЯ ТЕЧЕНИЙ, УЧЕТ ИХ ПРИ ПЛАВАНИИ
Морскими течениями называются горизонтальные перемещения водных масс. Течения возникают в результате воздействия на водные массы различных сил, зависящих от астрономических и гидрометеорологических явлений. Течения бывают постоянные, периодические и временные.
Постоянные течения устойчиво сохраняют свое направление и скорость.
Периодические течения меняют направление и скорость. К ним относятся приливо-отливные течения, направление и скорость которых зависят от периода и величины приливообразующей силы.
Временные течения вызываются временными факторами и меняют свое направление и скорость без какой-либо закономерности. Такие течения могут вызываться ветром, изменением уровня моря или атмосферного давления.
Сведения о течениях и их элементах даются в лоциях и ежегодных таблицах приливов, указываются на морских картах и атласах течений.
Течения характеризуются направлением и скоростью. Например «135°—2,0 уз» означает, что течение имеет направление 135° и скорость 2 уз.
 Рис. 44. К определению элементов течения навигационным способом
Рис. 44. К определению элементов течения навигационным способом
Выбранные из указанных пособий элементы течения могут отличаться от действительных по целому ряду причин. Вследствие этого при плавании в районах, где действует течение, необходимо проверять правильность принятых для счисления элементов течения. Наиболее применим в данном случае навигационный способ. Сущность этого способа заключается в сравнении счислимых и обсервованных мест судна. Для этой цели, следуя определенным курсом ГКК 61,2° (рис. 44) ее скоростью Vл, несколько раз на дежным способом определяют место судна. Соединив отрезком прямой обсервованные места с точкой M1, получают линию пути - ПУβ. На истинном курсе находят счислимую точку M2, соединяют ее с последним обсервованным местом и получают вектор Vт, характеризующий направление течения и значение его скорости (в узлах). Расстояние М1М3 будет являться действительной скоростью V судна.
Судно под действием движителей перемещается относительно водной среды. Если водная среда неподвижна, то это перемещение будет происходить по направлению истинного курса со скоростью, которую показывает лаг. При наличии течения судно будет подвержено воздействию двух сил, одна из которых будет перемещать судно по направлению истинного курса со скоростью Vл (рис. 45), а другая перемещать судно по направлению течения со скоростью Vт. Под действием этих сил судно будет перемещаться по равнодействующей этих сил со скоростью V. Диаметральная плоскость судна при этом будет параллельна ИК, проложенному на карте.
Треугольник, сторонами которого являются: вектор скорости судна Vл (см. рис. 45), направленный по линии истинного курса;
вектор скорости течения Vт, направленный по направлению течения; вектор истинной скорости судна V, направленный по линии пути, называется навигационным.
Линия, по которой будет перемещаться судно под воздействием указанных сил, называется линией пути на течении.
Угол, заключенный между нордовой частью истинного меридиана и направлением линии пути, называется путевым углом на течении ПУβ. Он отсчитывается от 0° до 360°.
Угол β, образованный линией курса и линией пути, называется углом сноса или поправкой на течение.
Рис. 45. Навигационный треугольник Рис. 46. Графическое решение первой задачи
Если течение действует с левого борта, т. е. судно сносится вправо от линии истинного, курса, то угол β считается положительным (+); если с правого борта, т. е. судно сносится влево от линии истинного курса, угол β считается отрицательным (—).
Значение угла сноса β зависит от скорости течения, курсового угла, под которым течение воздействует на судно, и от скорости судна Vл.
Исходя из рисунка, можно определить:
ПУβ = ИК + (±β )
ИК=ПУ-(±β )
β=ПУβ-ИК.
При плавании с учетом постоянного течения, когда. его направление и скорость известны, приходится решать две задачи.
Первая задача. Известен истинный курс судна ИК и его скорость по лагу Ул. Определить путь судна ПУр и действительную скорость V.
Решение задачи сводится к следующему (рис. 46). Из начальной точки А, от которой начинается учет течения, по линии истинного курса ИК откладывают скорость по лагу Vл. Затем в том же масштабе по направлению течения откладывают скорость течения Vт и получают точку С. Соединив точку А с точкой С, получают путь судна ПУβ и V—действительную скорость судна при плавании на течении. Направление вектора скорости снимают с карты транспортиром.
Угол сноса
β=ПУβ-ИК.
Вторая задача. Известны путь судна ПУβ и его скорость по лагу Vл. Определить истинный курс ИК и его действительную скорость.
Задача решается следующим образом (рис. 47). От точки A по направлению течения откладывают скорость течения Vт и получают точку В. Из этой точки раствором циркуля, равным скорости судна Vл, делают засечку на линии пути и получают точку С. Направление ВС представляет собой искомый истинный курс. С помощью параллельной линейки переносят это направление к точке A и при помощи транспортира определяют значение ИК в градусах. Затем рассчитываем поправку на течение (угол сноса):
β=ПУβ-ИК.
АС представляет собой вектор действительной скорости судна (Vд).
Рис. 47. Графическое решение второй задачи Рис. 48. Счисление при плавании на течении
При ведении прокладки с учетом течения на карте истинный курс ИК проводят тонкой линией, а линию пути ПУβ — более жирной.
Все надписи — компасный курс, поправку компаса, значение угла сноса (3—делают над линией пути.
Расстояние, пройденное судном по лагу, откладывают на линии ИК и от полученной точки переносят на линию пути ПУβ параллельно направлению течения.
У счислимой точки на линии пути указывают момент по часам и отсчет лага. У счислимой точки на линии истинного курса никаких надписей не делают. При этом все время, пока учитывается течение, строят навигационный треугольник. Если судно совершило поворот на новый курс и учет течения продолжается, то вновь строят навигационный треугольник; если судно изменило скорость, навигационный треугольник также строят заново (рис. 48).
Рис. 49. Прокладка с учетом течения
При определении места в море, если получилась невязка между счислимой точкой и обсервованной точкой, на карту наносят обсервованное и счислимое места судна. Затем навигационный треугольник замыкают у счислимой точки (рис. 49). Измеряют значение невязки и ее направление и записывают в судовой журнал (например, «С==130°—0,8 мили»).
Из обсервованного места судна вновь строят навигационный треугольник и счисление ведут от обсервованной точки. Момент по часам и отсчет лага записывают у обсервованной точки.
2. Основные составляющие полного сопротивления движению судна.
3. Передатчик РЛС. Особенности конструкции, назначение основных блоков и их взаимодействие.
Приемопередающее устройство РЛС включает передатчик, антенно-волноводное устройство и приемник.
Передатчик и приемник размещаются в общем корпусе — приборе, который называется приемопередатчиком. В этом же корпусе размещается антенный переключатель. Канализация колебаний СВЧ от антенного переключателя к антенне и обратно производится с помощью общего волновода. Функциональная схема приемопередающего устройства приведена на рис. 8. а, а соответствующие временные диаграммы - на рис. 8, б.
Рис. 8. Функциональная схема и временные диаграммы приемопередающего устройства РЛС: а — схема; б — временные диаграммы
Передатчик РЛС вырабатывает мощные кратковременные импульсы сверхвысокой частоты, поступающие для излучения в антенну. Вырабатываются такие импульсы с помощью специального генератора СВЧ, управляемого импульсным модулятором, который срабатывает при поступлении синхроимпульсов 1 от синхронизатора. Обычно синхронизатор размещается в индикаторном устройстве РЛС, но иногда он может находиться и в приемопередатчике.
В приемопередатчиках судовых РЛС применяются в качестве генераторов СВЧ специальные устройства — магнетроны, работающие на фиксированной частоте в 3- или 10-сантиметровом, а иногда и в 8-миллиметровом диапазонах волн. Импульсная работа магнетрона осуществляется при подаче на него высокого напряжения в течение времени, равного требуемой длительности излучения импульсов. В передатчике РЛС длительность СВЧ импульсов обусловливается длительностью импульсов модулятора 2, изменение которой связано с переключателем шкал дальности ШД в индикаторе РЛС.
В связи с тем что импульсы передатчика повторяются через относительно большие интервалы времени, а их длительность незначительна, неэкономично использовать в качестве источника питания магнетрона обычный источник постоянного тока (выпрямитель В), рассчитанный на получение необходимой импульсной мощности в любой момент времени. Поэтому в судовых РЛС функции такого источника возлагают на модулятор, непосредственно формирующий один раз за период повторения импульсы постоянного напряжения необходимой мощности, используя для этого энергию сравнительно маломощного источника питания. В современных РЛС применяются в основном модуляторы с накопительными конденсаторами (для работы с более мощными магнетронами) или магнитные модуляторы (для магнетронов меньшей мощности), отличающиеся друг от друга принципом формирования кратковременных высоковольтных импульсов и применяющимися для этого элементами.
Импульсы 3, выработанные генератором сверхвысокой частоты ГСВЧ, по волноводу поступают в блок СВЧ непосредственно на антенный переключатель АП и ослабленными до неопасного уровня — на смеситель СМ2.
Антенный переключатель обеспечивает подключение антенны к передатчику для излучения импульса, а после прекращения излучения — к приемнику. Переключение происходит со столь малой задержкой по времени и таким образом, что при излучении импульса в приемник не проходит энергия, способная вызвать его повреждение, а при поступлении отраженных от объектов импульсов их энергия не тратится бесполезно в цепях передатчика. Кроме того, антенный переключатель предохраняет приемник и в случае прихода из антенны импульсов, принятых от соседних РЛС. Все эти процессы обеспечиваются газоразрядными и ферритовыми антенными переключателями, которые представляют собой определенное соединение газонаполненных разрядников и специальных волноводных секций.
Волновод, соединяющий приемопередатчик с антенной, обеспечивает канализацию СВЧ колебаний в обоих направлениях с минимальными потерями. С помощью вращающегося волноводного перехода ВП, имеющегося в антенне, обеспечивается излучение (импульсы 3) и прием отраженных колебаний (импульсы 4} последовательно по всем направлениям горизонта. Вращение антенного устройства производится через замедляющий редуктор от электродвигателя М, включаемого обычно отдельным выключателем. В антенне, кроме того, устанавливаются устройства для передачи углового положения антенны в индикатор и получения отметки курса собственного судна на его экране (датчик ДУО).
Слабые отраженные импульсы СВЧ из антенны, пройдя через антенный переключатель, поступают в приемник, где они преобразуются по частоте, усиливаются и детектируются. Высокая чувствительность приемника, способного принимать кратковременные импульсы, наиболее просто реализуется при использовании супергетеродинного приемника с промежуточной частотой, равной нескольким десяткам мегагерц (обычно 60 МГц). На такой частоте при использовании транзисторов или микросхем могут быть получены большое усиление и широкая полоса пропускания приемника. Поэтому отраженные импульсы СВЧ без предварительного усиления непосредственно на входе приемника преобразуются в импульсы промежуточной частоты. Необходимый в этом случае преобразователь частоты, способный работать на СВЧ, использует гетеродин, выполненный на клистроне или диоде Ганна, и диодный кристаллический смеситель, которые могут работать не только на сантиметровых, но и миллиметровых волнах. В смеситель поступают непрерывно вырабатывающиеся колебания 5 гетеродина Г с частотой fr и отраженные импульсы 4 из антенны с частотой колебаний, равной частоте магнетрона fм. В результате смешивания двух частот вырабатываются импульсы 6 промежуточной разностной частоты fп= =fг—fм, которые получают необходимое усиление в УПЧ, а затем подаются на детектор, где преобразуются в видеоимпульсы (импульсы 9).
В приемнике обычно применяется ручная регулировка общего усиления УПЧ, а также и временная регулировка усиления ВРУ, позволяющая уменьшить усиление для ближних объектов. Схема ВРУ, запускаемая синхроимпульсом 1, обеспечивает импульсом 7 запирание входных каскадов УПЧ на время излучения импульса передатчика, а затем постепенно увеличивает их усиление по мере прихода отраженных импульсов от все более удаленных объектов. Регулируя амплитуду импульсов ВРУ, можно в значительной степени устранить помехи от морских волн.
После детектора Д в приемниках РЛС по желанию оператора может быть включена дифференцирующая цепь с малой постоянной времени МПВ, которая выдает укороченные импульсы 10, а в результате — улучшает разрешающую способность РЛС по расстоянию и уменьшает влияние помех от дождя и др. Иногда в УПЧ приемника предусматривается переключение полосы пропускания.
Применяются два типа усилителей промежуточной частоты: с линейной или логарифмической зависимостью коэффициента усиления от уровня входного сигнала. Логарифмический УПЧ обеспечивает более равномерное усиление слабых и сильных сигналов во всем диапазоне дальности, а также повышает помехоустойчивость РЛС.
При работе РЛС частота магнетрона, а следовательно, частота принимаемых отраженных импульсов, а также и частота гетеродина могут произвольно меняться. Следовательно, разностная частота в этом случае будет отличаться от той частоты, на которую настроены контуры усилителя промежуточной частоты, и усиление приемника снижается. Для устранения этого явления радиолокационный приемник должен иметь устройство для автоматической подстройки частоты АПЧ или ручной подстройки частоты РПЧ.
Блок АПЧ следит за изменением промежуточной частоты, сравнивая ее с частотой настройки УПЧ, и, воздействуя при наличии разницы этих частот на гетеродин, изменяет частоту его колебаний так, чтобы промежуточная частота оставалась неизменной. В более простых РЛС может быть только РПЧ.
Билет № 11.
1. Компасные направления. Девиация магнитного компаса, таблица девиации компасных пеленгов, обратный компасный пеленг. Поправка магнитного компаса.
Угол в плоскости истинного горизонта между истинным и магнитным меридианами называется магнитным склонением и обозначается буквой d. Склонение отсчитывается от северной (N) части  истинного меридиана к Е и W от 0° до 180°. Восточному склонению приписывается знак плюс (+), а западному—знак минус (—).
истинного меридиана к Е и W от 0° до 180°. Восточному склонению приписывается знак плюс (+), а западному—знак минус (—).
Угол в плоскости истинного горизонта, заключенный между северной частью магнитного меридиана и линией курса, называется магнитным курсом (МК).
Угол в плоскости истинного горизонта, заключенный между северной частью магнитного меридиана и линией пеленга, называется магнитным пеленгом (МП).
Магнитный курс и магнитный пеленг отсчитываются от северной части магнитного меридиана от 0° до 360° по ходу часовой стрелки.
Направление, отличающееся от магнитного пеленга на 180°, называется обратным магнитным пеленгом (ОМП).
Зависимость между истинными и магнитными направлениями определяется формулами:
ИК=МК+d
ИП=МП+d
ОИП=ОМП+d
МК=ИК-d
МП=ИП-d
ОМП=ОИП-d
d=ИК-МК
d=ИП-МП
d=ОИП-ОМП
ОИП=MП±180°
Приведенные формулы алгебраические, и склонение d берется со своим знаком.
ДЕВИАЦИЯ
Находясь в магнитном поле Земли, судовая сталь намагничивается и судно становится большим магнитом, имеющим собственное магнитное поле.
Компасным меридианом называется след сечения плоскости истинного горизонта вертикальной плоскостью, проходящей через линию N-S картушки магнитного компаса.
Девиацией называется отклонение магнитной стрелки компаса от магнитного меридиана под воздействием магнитного поля стального судна. В горизонтальной плоскости это угол между магнитным NM и компасным Nk меридианом.
Рис. 22. Магнитные и компасные направления:
а — девиация положительная; б — девиация отрицательная
При изменении курса от 0° до 360° девиация дважды достигает максимальных значений и дважды нулевых. Эта девиация носит название полукруговой.
При изменении курса от 0° до 360° девиация четыре раза достигает максимальных и четыре раза нулевых значений. Девиация, создаваемая этими силами, называется четвертной.
Компасными направлениями называются направления, отсчитываемые от нордовой части компасного меридиана (рис. 22).
Компасным курсом называется угол в плоскости истинного горизонта, заключенный между нордовой частью компасного меридиана и линией курса.
Компасным пеленгом называется угол в плоскости истинного горизонта, заключенный между нордовой частью компасного меридиана и линией пеленга.
Основные формулы для магнитных и компасных направлений (см. рис.22):
МК==КК+ δ
МП=КП+ δ
ОМП=ОКП+ δ
КК==МК- δ
КП=МП- δ
ОКП==ОМП- δ
δ =МК-КК
δ ==МП-КП
δ =ОМП-ОКП.
УНИЧТОЖЕНИЕ ДЕВИАЦИИ И ОПРЕДЕЛЕНИЕ ОСТАТОЧНОЙ ДЕВИАЦИИ
Необходимость уничтожения девиации. Девиация магнитных компасов, установленных на современных судах, изготовленных из стали различных сортов, е результате действия магнитных сил судна может достигать десятков градусов. На некоторых курсах эти силы могут настолько ослабить магнитное поле Земли, что направляющая сила КН не в состоянии преодолеть силы трения между шпилькой и топкой и у картушки появляется застой, т. е. безразличное равновесие. Если направляющая сила мала, то при повороте судна на новый курс линия N — S картушки очень медленно приходит в компасный меридиан. Может случиться, что на некоторых курсах компас вообще не будет работать.
При больших значениях девиации изменение курса, наблюдаемое по компасу, не будет соответствовать действительному углу поворота.
Чтобы обеспечить надежность и точность показаний магнитного компаса, необходимо уничтожить его девиацию. Для этого используют постоянные магниты и бруски из мягкой в магнитном отношении стали.
Силы, вызывающие четвертную девиацию, возникают от судовой стали, мягкой в магнитном отношении. Следовательно, компенсировать эти силы нужно такой же сталью.
Силы, вызывающие полукруговую девиацию, возникают от твердой и частично от мягкой в магнитном отношении стали. Следовательно, их влияние можно компенсировать постоянными магнитами. Однако следует помнить, что значение этих сил зависит от широты, поэтому, если судно после установки компенсирующих магнитов окажется в другой широте, то компенсация может быть нарушена.
Для компенсации этих сил применяются магниты-уничтожители, которые входят в комплект магнитного компаса. Эти магниты вставляют в каретки девиационного прибора. Продольные магниты создают продольную силу, а поперечные магниты — поперечную силу. Работа по уничтожению полукруговой девиации заключается в правильной установке продольных и поперечных постоянных магнитов-уничтожителей.
При этом следует иметь в виду следующее:
магниты-уничтожители должны быть такой силы, чтобы каретки девиационного прибора с магнитами можно было расположить в самой нижней части девиационного прибора и не слишком близко одну от другой;
если для компенсации какой-либо силы двух магнитов окажется мало, то находящиеся на каретках магниты необходимо заменить более сильными. Если и этого окажется недостаточно, надо установить дополнительную каретку с соответствующими магнитами;
передвигать каретки с магнитами следует осторожно, особенно если эти каретки расположены в верхней части девиационного прибора.
Сначала надо компенсировать силы, вызывающие четвертную девиацию, а затем уничтожать полукруговую девиацию. Такая последовательность работы объясняется тем, что четвертная девиация уничтожается брусками мягкой в магнитном отношении стали, которые имеют некоторый остаточный магнетизм и, уничтожая четвертную девиацию, одновременно изменяют и полукруговую.
Постоянная девиация незначительна и поэтому обычно не уничтожается.
При качке или крене судна возникает еще и креновая девиация. Она уничтожается вертикальным магнитом, расположенным в трубе девиационного прибора.
Следует помнить, что полностью уничтожить девиацию практически невозможно, вот почему после работы по уничтожению девиации определяют остаточную девиацию и составляют таблицу ее значений. Этой таблицей пользуются во время плавания.
Рассмотрим порядок работы по уничтожению полукруговой девиации на четырех главных магнитных курсах.
1. На магнитном курсе 0° поперечными магнитами доводят девиацию магнитного компаса до нуля.
2. На магнитном курсе 180° этими же поперечными магнитами уменьшают наблюдаемое значение девиации вдвое.
3. На магнитном курсе 90° продольными магнитами доводят девиацию до нуля.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
