



АРМы ЕСИМО
|
Название |
Адрес |
|
1 |
2 |
|
Морская коллегия |
http://data. *****/resource/personalpage/collegeCustomerPage. jsp |
|
Минтранс |
http://data. *****/resource/personalpage/mintransCustomerPage. jsp |
|
Рыболовство |
http://data. *****/resource/personalpage/gkrCustomerPage. jsp |
|
ГУНиО |
http://data. *****/resource/personalpage/gunioCustomerPage. jsp |
|
МЧС |
http://data. *****/resource/personalpage/customerPage. jsp |
|
Арктика |
http://data. *****/resource/personalpage/customerPage. jsp |
|
Антарктика |
http://data. *****/resource/personalpage/customerPage. jsp |
Кроме того, механизм и программное обеспечение его поддержки ЕСИМО предоставляют широкие возможности для разработки и использования разнообразных функциональных приложений – АРМов пользователей ЕСИМО.
Эти приложения позволяют «виртуально» сегментировать источники баз данных по различным признакам и, тем самым, генерировать АРМы пользователей различной конфигурации.
Рассмотрим АРМ судоводителя, разработанный по технологии ЕСИМО и представляющий собой функциональное приложение телекоммуникационной сети. Это электронный документ, написанный в формате HTML, который состоит из двух блоков:
- информационный блок ЕСИМО;
- судовой информационный блок документов и программ.
Разработанный АРМ судоводителя, можно использовать в нескольких вариантах:
- Как обычный Web-сайт.
- В сетевом варианте при работе в судовой компьютерной системе;
- Автономно. При этом будет доступен только судовой информационный блок документов и программ.
Доступ к различным ресурсам ЕСИМО через АРМ судоводителя и к судовым рабочим документам и программам происходит при активизации соответствующей ссылки.
Например, группа ссылок «Документы на приход-отход» представлена ссылками на документы, которые требуются для оформления прихода и отхода судна. К этой группе относятся следующие ссылки и соответствующие им документы:
- Судовая роль на русском и английском языках (ИМО форма);
- Заявления на отход и приход;
- Акт выпуска судна из порта (форма Д);
- Генеральная декларация;
- Список портов захода (list ports of call);
- Грузовая декларация (cargo declaration);
- Декларация о личных вещах экипажа (crew declaration);
- Port clearance.
При активизации одной из ссылок открывается соответствующий документ.
АРМ - мощное современное средство повышения эффективности работы инженера. Для судоводителя, работа которого сложна, ответственна и сопряжена с необходимостью обработки большого потока информации, использование АРМ поможет повысить эффективность и безопасность мореплавания.
Результаты, полученные при разработке АРМ судоводителя, могут использоваться в учебном процессе и при соответствующей доработке программного обеспечения на практике при работе с судовой документацией по отходу-приходу и при поиске информации по навигационному обеспечению безопасности плавания судна.
Литература
1. , Ященко телекоммуникационная сеть ЕСИМО [электронный ресурс] // Труды ВНИИГМИ-ЦД.- 2007. - Вып. 172. http://www. *****/publish_tr/trudy172/trudy172.htm (08.08.2007).
2. Автоматизированные рабочие места [Электронный ресурс] // Единая система информации об обстановке в Мировом океане (ЕСИМО): [web-сайт]. http://www. *****/content/total/arm_techno. htm (08.08.2007).
3. Фадюшин технологии в судовождении: Учеб. пособие. - Владивосток: Мор. гос. ун-т, 20с.
ХАРАКТЕРИСТИКИ ТОЧНОСТИ АВТОНОМНОГО РЕЖИМА РАБОТЫ GPS-ПРИЁМНИКА J-NAV500
,
МГУ им. адм. , г. Владивосток
В результате обработки полугодовых экспериментальных наблюдений за работой в автономном режиме судового приёмника СРНС Навстар GPS J-NAV500 получены показатели вариаций средних значений, средних квадратических отклонений, асимметрий и эксцессов эмпирических распределений обсервованных координат. Обнаружена высокая коррелируемость характеристик точности обсервованных долгот и возвышений антенны над геоидом.
Судовой приёмник спутниковой радионавигационной системы (СРНС) Навстар GPS J-NAV500 изготавливается японской корпорацией JRC (Japan Radio Corporation). Данный приёмник способен принимать дифференциальные поправки. На внешние устройства через СОМ-порт приёмник выводит обсервованные координаты с разрядностью трёх знаков после запятой минут через каждые 2 секунды.
В ноябре 2007 года один образец приёмника J-NAV500 был установлен в лаборатории радионавигационных приборов и систем кафедры технических средств судовождения. 11 декабря 2007 года начались систематические экспериментальные наблюдения, чтобы накопить данные для оценки точности определения обсервованных координат. Наблюдения продолжались до 4 июля 2008 года включительно. Данные от приёмника автоматически записывались на жёсткий диск ноутбука в стандарте NMEA 0183. При этом приёмник поочерёдно переводился из режима приёма дифференциальных поправок от станции DGPS м. Поворотного в автономный режим и наоборот. Продолжительность непрерывного накапливания информации в каждом режиме составляла 2 – 3 суток. Конечная цель исследования состояла в сравнении точности обсервованных координат дифференциального режима работы с точностью автономного. Проведение такого рода сравнительного анализа требует предварительных исследований характеристик точности приёмника в автономном режиме работы. Полученные результаты послужат количественной основой сравнения. Данная работа посвящена оценке точности J‑NAV500 при работе в автономном режиме, чтобы учесть влияние сезонных изменений в трансионосферном канале распространения сигналов от спутников СРНС Навстар GPS.
В данном исследовании по каждому месяцу наблюдений рассчитывались не только величины среднего и среднего квадратического отклонения (СКО) обсервованных координат, но и асимметрия, и эксцесс эмпирических плотностей распределений. Асимметрию и эксцесс применяют для предварительной оценки близости закона распределения исследуемой выборки закону Гаусса.
Асимметрией теоретического распределения случайной величины (A) является отношение центрального момента третьего порядка (µ3) к кубу среднего квадратического отклонения (σ) случайной величины. Или для случая широты


где mφ – математическое ожидание широты, 
Если A > 0, то кривая плотности распределения случайной величины имеет относительно значения математического ожидания затянутое правое крыло по сравнению с левым. Иными словами, при A > 0 среднее значение больше моды. Статистическая оценка асимметрии вычислялась следующим образом:


где ![]() – центральный эмпирический момент третьего порядка; φi – данное значение обсервованной широты, зарегистрированное в экспериментальных наблюдениях;
– центральный эмпирический момент третьего порядка; φi – данное значение обсервованной широты, зарегистрированное в экспериментальных наблюдениях; ![]() ;
; ![]() – выборочное среднее значение широты; ni – зарегистрированное количество значений φi ; N – объём выборки за данный месяц.
– выборочное среднее значение широты; ni – зарегистрированное количество значений φi ; N – объём выборки за данный месяц.
Эксцесс (E) представляет собой равенство

где µ4 – центральный момент четвёртого порядка.
Распределение Гаусса обладает следующим свойством: µ4/σ4 = 3. Поэтому, если эксцесс распределения случайной величины равен нулю, то этот факт является признаком принадлежности распределения случайной величины Гаусса. Если E > 0, то кривая плотности случайной величины имеет более острую вершину, нежели кривая плотности закона Гаусса. При E < 0 кривая плотности распределения случайной величины имеет менее острую вершину по сравнению с кривой Гаусса.
Центральный эмпирический момент четвёртого порядка (![]() ) для
) для
обсервованных широт вычислялся по формуле 
Результаты вычислений помещены в табл. 1 – 3.
Таблица 1
Статистические характеристики распределения широты приёмника J‑NAV500 в автономном режиме работы
|
Время наблюдений |
Объём выборки |
Среднее, минуты |
СКО, м |
Асимметрия |
Эксцесс |
|
Декабрь 2007 |
336922 |
0,16955 |
1,34054 |
0,064 |
0,377 |
|
Январь 2008 |
388894 |
0,16962 |
1,43905 |
0,209 |
0,609 |
|
Февраль 2008 |
339390 |
0,16961 |
1,31092 |
0,044 |
0,437 |
|
Март 2008 |
159616 |
0,16966 |
1,40868 |
0,255 |
0,588 |
|
Апрель 2008 |
501369 |
0,16975 |
1,44868 |
0,049 |
0,945 |
|
Май 2008 |
466113 |
0,16981 |
1,24463 |
0,089 |
2,526 |
|
Июнь 2008 |
475953 |
0,16973 |
1,29481 |
– 0,006 |
1,495 |
|
За весь период |
2668257 |
0,16969 |
1,36221 |
0,077 |
1,017 |
Таблица 2
Статистические характеристики распределения долготы приёмника J‑NAV500 в автономном режиме работы
|
Время наблюдений |
Объём выборки |
Среднее, минуты |
СКО, м |
Асимметрия |
Эксцесс |
|
Декабрь 2007 |
336922 |
0,05823 |
1,05396 |
– 0,154 |
1,505 |
|
Январь 2008 |
388894 |
0,05813 |
0,98017 |
0,062 |
0,524 |
|
Февраль 2008 |
339390 |
0,05805 |
0,95969 |
– 0,024 |
0,296 |
|
Март 2008 |
159616 |
0,05800 |
1,02059 |
0,116 |
0,755 |
|
Апрель 2008 |
501369 |
0,05814 |
1,13861 |
0,176 |
1,011 |
|
Май 2008 |
466113 |
0,05817 |
0,93948 |
0,077 |
0,503 |
|
Июнь 2008 |
475953 |
0,05814 |
0,91316 |
0,121 |
0,684 |
|
За весь период |
2668257 |
0,05814 |
1,006 |
0,071 |
0,822 |
Таблица 3
Статистические характеристики распределения возвышения антенны приёмника J‑NAV500 в автономном режиме работы
|
Время наблюдений |
Объём выборки |
Среднее, метры |
СКО, м |
Асимметрия |
Эксцесс |
|
Декабрь 2007 |
336922 |
57,13672 |
2,49563 |
– 0,428 |
0,318 |
|
Январь 2008 |
388894 |
57,60721 |
2,26177 |
– 0,176 |
0,787 |
|
Февраль 2008 |
339390 |
57,57148 |
2,13042 |
– 0,365 |
0,344 |
|
Март 2008 |
159616 |
57,19119 |
2,67753 |
– 0,244 |
0,016 |
|
Апрель 2008 |
501369 |
57,49393 |
2,61092 |
– 0,214 |
– 0,151 |
|
Май 2008 |
466113 |
58,04810 |
2,14409 |
– 0,342 |
0,168 |
|
Июнь 2008 |
475953 |
58,45667 |
2,03589 |
– 0,259 |
0,468 |
|
За весь период |
2668257 |
57,72563 |
2,35606 |
– 0,352 |
0,362 |
Анализ полученных результатов удобнее вести с помощью рис. 1 – 3. На рисунках левые панели показывают тенденции изменения средних значений координат, а на правых представлены графики тенденций изменения средних квадратических отклонений.
Рис. 1. Тенденции изменения средних и СКО широты
Рис. 2. Тенденции изменения средних и СКО долготы
Рис. 3. Тенденции изменения средних и СКО возвышения антенны
На рис. 1 можно видеть, что средняя месячная широта с декабря 2007 года по май 2008 года монотонно возрастает. Изменение составило 0,00026 минуты (0,481 м) к северу. Средняя за месяц долгота (рис. 2) с декабря по март смещается на 0,00026 минуты (0,352 м) к западу. Затем она начинает дрейфовать к востоку. Схожий характер изменения можно наблюдать и у среднего значения возвышения антенны (рис. 3). За весь период наблюдений среднее возвышение увеличилось на 1,32 м. Коррелируемость средних долгот со средними возвышениями антенны гораздо выше по сравнению со средними широтами. Интересно отметить неожиданный факт того, что в марте обнаруживается минимальные значения почти всех средних обсервованных координат.
В ходе подготовки к проведению экспериментальных наблюдений было выдвинуто предположение о годовом периоде изменения средних значений обсервованных координат с экстремумами в декабре и в июне. Такая гипотеза основывалась на давно известном годовом цикле процессов перестройки ионосферы [1]. Явно выраженный экстремум, приходящийся на март, позволяет сделать вывод о более сложном характере причин изменения средних значений обсервованных координат, нежели ожидалось. На левых панелях рис. 1 – 3 убедительно прослеживается дополнительный полугодовой цикл.
Относительно средних квадратических отклонений, как показателей случайных погрешностей обсервованных координат, накануне экспериментальных наблюдений считалось, что они должны монотонно увеличиваться с декабря по июнь. Это обосновывалось известным фактом увеличения флуктуаций полной электронной концентрации в трансионосферном канале распространения радиосигналов от спутников в дневное время по сравнению с ночным [1]. Поэтому считалось, что в июне величины СКО обсервованных координат будут больше, нежели в декабре из-за более продолжительного светлого периода времени суток. Анализ графиков СКО (правые панели рис. 1 – 3) позволяют сделать противоположное заключение, так как на графиках наблюдается общая тенденция к снижению СКО с декабря по июнь. Более того, наблюдаются совершенно неожиданные всплески ухудшения точности обсервованных координат, приходящиеся на март-апрель.
Если сравнивать между собой асимметрии эмпирических распределений обсервованных широт, долгот и возвышений антенны, то следует отметить практически устойчивые незначительные положительные величины асимметрий в распределениях широт и долгот. Асимметрии возвышений антенны всегда отрицательны, а по абсолютной величине они значительно больше асимметрий плановых координат. Здесь также надо отметить высокую коррелируемость значений асимметрий распределений долгот и возвышений. Имеет место более высокая частота колебаний (с периодом около двух месяцев) величин асимметрий по сравнению с колебаниями величин средних значений. Эти факты открывают перспективу создания алгоритма вычисления поправок для компенсации систематических погрешностей обсервованных координат. Присутствие асимметрий можно объяснить несимметричностью траекторий пролётов спутников СРНС Навстар GPS относительно плоскости первого вертикала.
Наибольшие величины эксцессов характерны для эмпирических распределений широт и долгот. Это свидетельствует о суперпозиции более высоких частот колебаний значений обсервованных широт и долгот по сравнению со значениями возвышений антенны.
Литература
1. Кеннет Дэвис. Радиоволны в ионосфере. – М.: Мир, 1973. – 502 с.
ОЦЕНКА ВРЕМЕНИ УПРЕЖДЕНИЯ НАЧАЛА МАНЕВРА
ДЛЯ РАСХОЖДЕНИЯ ПРИ ОПАСНОМ СБЛИЖЕНИИ СУДОВ
,
МГУ им. адм. , г. Владивосток
При решении задач расхождения судов судоводителю необходимо учитывать маневренные характеристики судов для выбора начала маневра расхождения для предотвращения опасного сближения. Очень простой и удобный метод рекомендуется для маневра изменением только курса и маневра изменением только скорости с наглядными графическими пояснениями. Алгоритмы и системы формул, разработанные для получения результатов, приведенных в статье, могут быть применены в для расчета предполагаемого маневра в разрабатываемых и действующих САРП и СУДС.
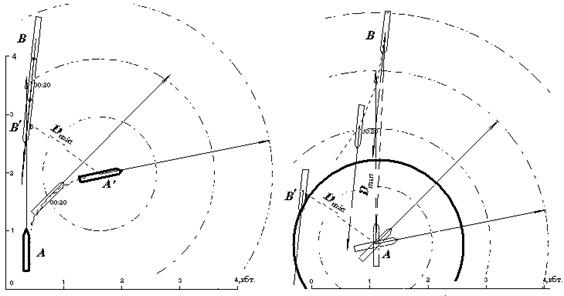
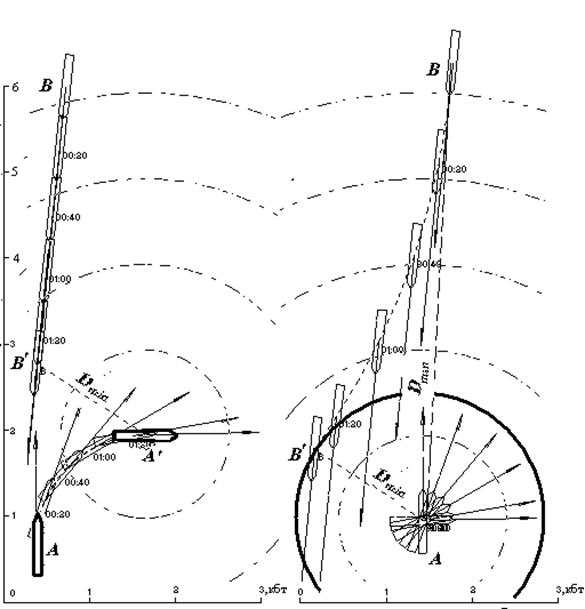
При решении задач расхождения судов судоводителю необходимо учитывать маневренные характеристики судов для выбора начала маневра расхождения для предотвращения опасного сближения. Для примера рассмотрим стандартную процедуру решения конкретной задачи на расхождение изменением только курса с помощью маневренного планшета. На рис. 1 наше судно двигается курсом 000˚ со скоростью 13.0 уз. Данные о первых трех точках наблюдения за целью А приведены в таблице обработки радиолокационной информации. и представлены как точки 1, 2, 3.
В результате обработки первых трех точек наблюдения получены следующие данные: дистанция кратчайшего сближения Дкр. = 0.0 кбт, время кратчайшего сближения от третьей точки наблюдения Ткр. = 12.0 мин.
Допустимая дистанция кратчайшего сближения установлена в 2 мили. Окружность для заданной дистанции расхождения радиусом 2 мили построена вокруг центра нашего судна О.
Для расчета маневра поворота в предполагаемой 5-й точке прокладки, обозначенной на рис. 1 как точка С, применяется стандартная процедура расчета:
- строим шестиминутный вектор скорости своего судна ОА длиной 13 кбт.;
- строим параллельный ему вектор О’A’ такой же длины так, чтобы конец этого вектора был направлен в первую точку наблюдения за целью;
- строим вектор шестиминутный вектор скорости цели О’В из начала вектора О’A’ в третью точку наблюдения за целью, и находим курс цели ИК = 240˚, скорость цели V = 18.0 уз.;
- строим касательную CD к окружности О, которой предполагается стать линией относительного движения (ЛОД) судна-цели после маневра нашего судна;
- строим прямую BD’ из третьей точки наблюдения параллельно CD;
- разворачиваем вектор O’A’ вправо до пересечения с BD’ и получаем шестиминутный вектор скорости своего судна для маневра расхождения O’A’’ и . находим курс нашего судна для отворота 123˚.
Очевидно, что команда начать поворот должна быть отдана раньше, чем судно-цель достигнет расчетной точки C в относительном движении. Если диаметр циркуляции нашего судна 1000м (5.4кбт.), то время поворота на курс 123˚ примерно 3.1 мин.
С другой стороны, если команда начать поворот на нашем судне будет отдана за время 3.1 мин.. до достижения судном-целью расчетной точки C, то дистанция кратчайшего сближения при расхождении будет уже другой, так как судно-цель в момент окончания маневра будет уже не в расчетной точке С, а в некоторой другой точке, обусловленной маневренными характеристиками нашего судна и геометрией встречи..
Для более точного определения времени отдачи команды начать поворот на нашем судне выполним построения в прямоугольнике, выделенном на рис. 1 вокруг точки С и увеличенном на рис. 2:
- построим вектор O’’C, параллельный вектору скорости судна-цели O’B , направленный в расчетную точку С и по длине равный расстоянию 9.3 кбт., которое судно-цель проходит за время поворота нашего судна 3.1 мин.;
- из точки O’’ построим вектор O’’E, который представляет собой истинное перемещение нашего судна за время маневра поворота на угол 123˚;
- проводим прямую EE’ параллельно предполагаемой ЛОД CD до пересечения с исходной ЛОД BC в точке M; точка M и будет точкой отдачи команды начать поворот на нашем судне.
Таким образом мы получили, что команда начать поворот для расхождения должна быть отдана за 9 кбт.(или 1.7 мин.) в относительном движении до достижения судном-целью расчетной точки С. Если же команда начать поворот была отдана в в расчетной точке С, то ошибка в дистанции кратчайшего сближения составила бы 7.8 кбт. (длина перпендикуляра CF на рис. 1 и рис. 2), Эта величина вполне сопоставима с заданной нам допустимой дистанцией, и при прочих условиях могла бы стать критической.
Если же поворот будет начат в точке M, то судно-цель в результате нашего маневра выйдет на рассчитанную ЛОД, и вернется к направлению прежней ЛОД после команды возврата нашего судна на прежний курс, отданной в точке M’ на рис. 1 (рассчитанной по такой же методике).
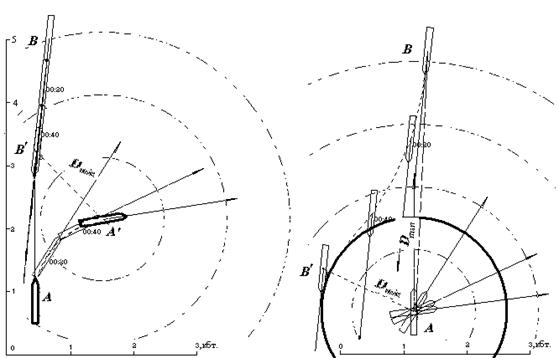
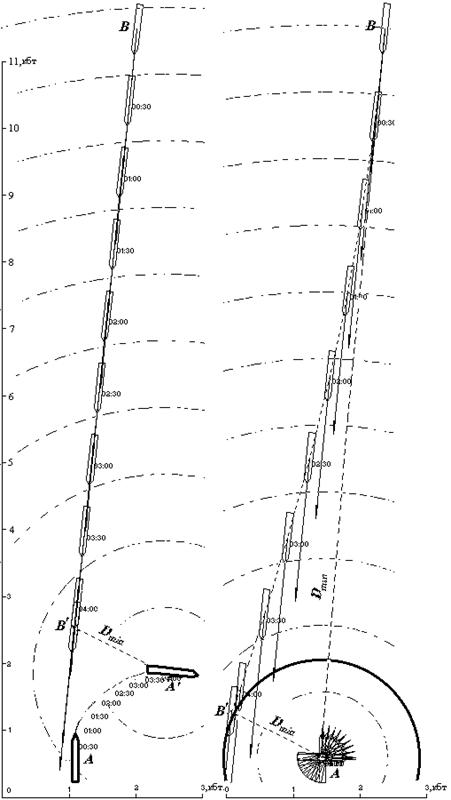
Рассмотрим похожую ситуацию для маневра изменением только скорости. На рис. 3 наше судно двигается курсом 000˚ со скоростью 18.0 уз. Данные о первых трех точках наблюдения за целью А приведены в таблице обработки радиолокационной информации и представлены как точки 1, 2, 3 на рис. 3.
В результате обработки первых трех точек наблюдения получены следующие данные: дистанция крсатчайшего сближения Дкр. = 0.0 кбт, время кратчайшего сближения от третьей точки наблюдения Ткр. = 16.0 мин.
Стандартная процедура расчета аналогична приведенной выше с тем лишь отличием, что новая скорость получается как вектор O’A’’ с началом в точке O’ и концом в точке пересечения начальной скорости O’A’ и линии BD’, параллельной предполагаемой линии относительного движения цели после маневра нашего судна.
Аналогичным образом находим курс цели 250˚ и скорость цели 18.0 уз. Новая скорость нашего судна для расхождения 4.6 уз.
Очевидно, что команда начать снижение скорости должна быть отдана раньше, чем судно-цель достигнет расчетной точки C в относительном движении. Если время свободного торможения нашего судна со скорости 18.0 уз. до 2.0 уз. составляет 25.6 мин, то время снижения хода до 4.6 уз. будет примерно 9.3 мин. (без применения реверсов).
С другой стороны, если команда начать снижение скорости на нашем судне была бы отдана за время 9.3 мин.. до достижения судном-целью расчетной точки C (т. е. где-то еще в районе 2-й точки наблюдения), то дистанция кратчайшего сближения при расхождении будет уже другой, так как судно-цель в момент окончания маневра будет уже не в расчетной точке С, а в некоторой другой точке, обусловленной маневренными характеристиками нашего судна и геометрией встречи.
Для более точного определения времени отдачи команды начать снижение скорости на нашем судне выполним построения в прямоугольнике, выделенном на рис. 3 вокруг точки С и увеличенном на рис. 4:
- построим вектор O’’C, параллельный вектору скорости судна-цели O’B , направленный в расчетную точку С и по длине равный расстоянию 27.9 кбт., которое судно-цель проходит за время снижения хода нашим судном 9.3 мин.;
- из точки O’’ построим вектор O’’E длиной 8.5кбт., который представляет собой истинное перемещение нашего судна за время снижения хода до 4.6 уз.;
- проводим прямую EE’ параллельно предполагаемой ЛОД CD до пересечения с исходной ЛОД BC в точке M; точка M и будет точкой отдачи команды начать поворот на нашем судне.
Таким образом мы получили, что команда начать снижение хода для расхождения должна быть отдана за 7.5 кбт.(или 1.7 мин.) в относительном движении до достижения судном-целью расчетной точки С. Если же команда начать снижение хода была бы отдана в в расчетной точке С, то ошибка в дистанции кратчайшего сближения составила бы 4.0 кбт.(длина перпендикуляра CF на рис. 3 и рис.). Эта величина вполне сопоставима с заданной нам допустимой дистанцией, и при прочих условиях могла бы стать критической.
Если же снижение хода будет начато в точке M, то судно-цель в результате нашего маневра выйдет на рассчитанную ЛОД, и вернется к направлению прежней ЛОД после команды возврата нашего судна к прежней скорости, отданной в точке M’ на рис.3 (рассчитанной по такой же методике).
Конечно, судоводителю в реальных условиях плавания было бы весьма затруднительно произвести подобные построения, да и масштаб маневренного планшета для них не приспособлен.
Однако существует быстрый и эффективный способ для оценки времени упреждения начала маневра для расхождения.
Разработаны системы формул и алгоритмы для всевозможных ситуаций сближения. Различные комбинации расхождения судов были исследованы с помошью специальных программ.
Анализ и сравнение многочисленных ситуаций сближения со всевозможными сочетаниями скоростей нашего судна и судна-цели, геометрии встречи и углов отворота позволяет вывести формулу (1) для оценки времени упреждения начала маневра изменением курса:
Тупр. = 0,7∙Tман. , (1)
где:
Тупр - время упреждения начала маневра изменением курса, мин.:
Tман. - время от начала маневра изменением курса до выхода на заданный курс, взятое из таблиц маневренных характеристик судна, мин.
В ранее рассмотренной ситуации на рис.1 и рис.2 Tман = 3.1 мин, и время упреждения начала маневра Тупр = 0,7∙3.1≈ 2.0 мин.
Действие формулы (1) было проверено для разностей курсов от 010˚ до 350˚ с интервалом в 010˚ для углов отворота от 030˚ до 120˚ с интервалом 030˚ в диапазоне скоростей маневрирующего судна от 5уз. до 35 уз. с с интервалом в 5уз. и в диапазоне скоростей судна-цели от 5уз. до 35 уз. с с интервалом в 5уз. во всевозможных сочетаниях.
Проверка показала, что для судна с диаметром циркуляции 1000м( 5.4 кбт.) в любом из рассмотренных случаев при угле отворота до 120˚ включительно ошибка в дистанции кратчайшего сближения не превысит 1 кбт., что вполне допустимо в реальных условиях плавания, если маневр был выполнен достаточно заблаговременно.
Анализ ситуаций с изменением скорости для расхождения показал, что время упреждения начала маневра скоростью для заранее рассчитанного маневра не зависит от скорости судна-цели и геометрии встречи и может быть рассчитана по формуле (2):
|
|
|
(2) |
где:
Тупр - время упреждения начала маневра изменением скорости, мин..:
Tман. - время от начала маневра изменения скорости до выхода на рассчитанную скорость, взятое из таблиц маневренных характеристик судна или рассчитанное соответствующим образом , мин..
Sман. – путь в истинном движении от начала маневра изменения скорости до выхода на рассчитанную скорость, взятый из таблиц маневренных характеристик судна, или рассчитанный соответствующим образом, кбт..
V0 – начальная скорость судна, кбт./мин.
Vман. – конечная скорость судна, рассчитанная для маневра, кбт./мин.
Если для снижения хода не предполагаются реверсы, то обработка и анализ формулы (1) приводит к выводам, представленным в таблице 1:
Таблица 1
|
Проценты снижения расчетной скорости по отношению к первоначальной |
Формула для расчета времени упреждения начала маневра снижения хода |
|
75% - 90% |
Тупр. = 0,3∙Tман |
|
20%-75% |
Тупр. = 0,2∙Tман |
|
20% и менее |
Тупр. = 0,1∙Tман |
Использование табл. 1 рассмотрим на приведенном выше примере на рис. 3 и 4: судно идет со скоростью 18 уз., предполагается снижение хода до 4.6 уз., т. е до 36%, из таблиц маневренных элементов находим, что для этого нужно время 9.3 мин., и применяя коэффициент 0.2 из таблицы 2, получаем Тупр. = 1.8 мин.
При использовании формул (1), (2) и табл. 1 следует иметь ввиду, что применимы они в тех же условиях, что и таблица маневренных элементов судна, т. е. обычно это течение до 1 уз, волнение моря до 3-х баллов, скорость ветра до 5 м/с. При неблагоприятных погодных условиях действие приведенных формул и таблицы может быть существенно ограниченно, особенно при маневре судна с небольшой скоростью.
Разумеется, формулы (1), (2) и табл. 1 применимы только в случаях, когда действие для предотвращения опасного сближения предпринято заблаговременно и в соответствии с хорошей морской практикой. Алгоритмы и системы формул, разработанные для получения вышеприведенных результатов, могут быть применены в для расчета предполагаемого маневра в разрабатываемых и действующих САРП и СУДС.
Литература
1. Lisowski J. A. (1980) A Differential Game Model of Ship Control. Proceedings of the Seventh IFAC Congress, vol.2. - Oxford,..
2. Lamb, W. G. (1985) The Calculation of Marine Collision Risks. This Journal 38, 365-374.
3. Lyster C. A.,Knights H. L. Prediction Eguations for Ship's Turning Circles: Trans. NE Coast Institute Engeneering and Shipbuilding, vol.94, No@4,1979,p.217-229
|
Рис. 1

Рис. 2
|
Рис.3
 |
Рис.4.
ОЦЕНКА ВОЗМОЖНОСТИ ПРЕДУПРЕЖДЕНИЯ ОПАСНОГО
СБЛИЖЕНИЯ СУДОВ НА ВСТРЕЧНЫХ КУРСАХ
, ,
МГУ им. адм. , г. Владивосток
При любом сближении судов судоводитель ставится перед необходимостью определить степень опасности ситуации и принять уверенное и своевременное действие для предупреждения столкновения, соответствующее хорошей морской практике. Причем оценка степени опасности сближения судов носит исключительно субъективный характер и целиком и полностью зависит от квалификации и опыта судоводителя.
В Международных правилах предупреждения столкновений судов в море (МППСС–72) в части В (Правила плавания и маневрирования) отсутствуют какие–либо количественные оценки степени опасности сближения судов. Это связано с многообразием всевозможных ситуаций взаимного положения судов в сочетании с совокупностью других сопутствующих факторов.
Оценка ситуации и принятие решений судоводителем основаны на предыдущем опыте расхождений с другими судами и на опыте, полученном при обучении на специализированных тренажерах.
Существующее на современном судне средство автоматической радиолокационной прокладки (САРП) предоставляет только количественные характеристики взаимного перемещения судов: дистанцию и время кратчайшего сближения судов и др. Эти данные, в числе прочих факторов, отображаются на специальном табло прибора, что позволяет судоводителю принять грамотное решение о необходимости маневрирования. В лучшем случае, самые современные САРП могут позволить вариант «проигрывания» маневра судном–наблюдателем, но при условии сохранения другими судами курса и скорости.
Конечно, невозможно разработать такие численные критерии, которые учитывали бы абсолютно все факторы, влияющие на степень опасности сближения. В предлагаемой статье будут проанализированы отдельные правила МППСС-72 с целью получения некоторых количественных оценок.
Для примера рассмотрим правило 14, когда два судна с механическими двигателями сближаются на противоположных или почти противоположных курсах так, что возникает опасность столкновения. Важной особенностью такого варианта сближения двух судов является высокая относительная скорость сближения равная сумме скоростей двух судов. Принимая решение о расхождении это необходимо учесть. Современные суда следуют со скоростью порядка 16–20 узлов, что соответствует относительной скорости сближения от 32 – 40 узлов и более. При хорошей видимости устойчивое визуальное обнаружение цели обычно достигается на 8 милях, маневр для предупреждения опасного сближения в рамках правила 14 осуществляется на расстоянии около 5 миль, что при таких скоростных параметрах сближения, оставляет 4–5 мин на оценку ситуации и принятие решения и 7-9мин для осуществления маневра с последующим контролем его выполнения. Поэтому, быстро и правильно оценить ситуацию и грамотно построить своевременность действий весьма важно именно в такой ситуации сближения двух судов. Очевиден и другой аспект применения этого правила, –когда наблюдаемое судно находится «почти прямо» или «виден его соответствующий ракурс». Не всегда легко установить судоводителю, идут суда почти прямо навстречу друг другу или находятся на пересекающихся курсах. Нет какой–то определенности в разделении полномочий Правила 14 и начала «работы» по Правилу 15. Комментарии к МППСС–72 (, ) обращаются к судебно–арбитражной практике, на основании которой Правило 14, по их мнению, может применяться при разности встречных курсов в 6–8 град.
Если принять во внимание требование Приложения II МППСС–72, то бортовой огонь должен исчезать в пределах 1–3 град. за границей установленного сектора. Таким образом, если взять по максимуму с двойным запасом, то получим аналогично курсовой угол порядка 6 град одного борта.
Наиболее опасное положение возникает, когда наблюдается другое судно на остром курсовом угле СПРАВА (условие «сомнения»). В этой ситуации необходимо руководствоваться первым принципом Правила 8, а именно, выполнить отворот (каждое судно ДОЛЖНО) заблаговременно (вправо) и решительно. При подобных действиях маневр будет одинаковым как по Правилу 14, так и по Правилу 15. Если другое судно (с механическим двигателем) будет рассматривать ситуацию как попадающую под Правила 15 и 17(а), то оно, как наблюдающее первое судно слева, ДОЛЖНО будет сохранять свой курс и скорость.
С помощью компьютерного моделирования были проведены исследования на моделях судов различных размеров с варьированием скоростей при геометрии встречи такой, что курсовой угол на опасно приближающееся судно лежал в пределах 7° левого и правого борта.
Во всех вариантах на рис 1.1-1.4 судно В является НЕМАНЕВРИРУЮЩИМ, длиной в 140 м, во всех вариантах на рис 1.1-1.4 его скорость составляет 13 уз Маневрирующее судно А имеет также длину 140м, диаметр циркуляции 3.2 кбт., скорость его варьировалась в значениях:18, 13, 8 и 3 уз.
В качестве примера рассмотрим ситуацию, изображенную на рис.1.1, когда маневром только одного судна ещё можно избежать столкновения. Судно А на рис. 1.1а (истинное движение) поворачивает вправо для предотвращения столкновения; судно В сохраняет курс и скорость. С помощью специальной итерационной программы расстояние между судами в момент начала эффективного поворота маневрирующего судна было подобрано так, что при меньшем расстоянии опасного сближения избежать столкновения уже невозможно. На рис. 1.1b эта же ситуация представлена в относительном движении в ориентированной по норду системе координат маневрирующего судна А.
Минимальное допустимое расстояние расхождения (Dmin) между геометрическими центрами судов было принято равным сумме их длин (на приведенных рисунках 1.1 при длине судов по 140м минимальная дистанция составляла 1.5 кбт.). Начало маневра судном В и его завершение выделено темным цветом.
Моделирование производилось при начальной скорости судна А в 18 уз (рис. 1.1), 13 уз (рис. 1.2), 8 уз (рис 1.3), 3 уз (рис 1.4).
Зависимость минимального расстояния до опасного сближения (Dman), когда поворотом вправо только судна А в этой ситуации можно избежать столкновения, на рис. 1.1-1.4, может быть охарактеризована следующим образом:
– при увеличении скорости маневрирующего судна А (в исследуемом случае от 3 до 18 уз) него появляется больше возможности предотвратить развитие ситуации опасного сближения. Это выражается в уменьшении предельной дистанции (Dman) начала маневра.
– при очень малой скорости маневрирующего судна А, равной, например 3уз., на рис.1.4 она составляет 11 кбт. А эффективный поворот не менее чем на 100° вправо должен быть начат не менее чем за за 4.1 мин. до предполагаемой точки столкновения. Отметим, что если при тех же начальных условиях судно А сохраняет курс и скорость, то судну В со скоростью 13 уз. достаточно предпринять небольшой отворот вправо на 20°, чтобы суда разошлись на дистанции кратчайшего сближения 3 кбт.
– при скорости маневрирующего судна А в 18 уз., на рис.1.1, Dman= 3.5 кбт. Эффективный поворот не менее чем на 60° вправо должен быть начат не менее чем за 0.6 мин. до предполагаемого столкновения.
Таким образом, судно с очень маленькой скоростью имеет значительно меньше возможностей для предотвращения опасного сближения. Все данные моделирования сведены в табл. 1.
В табл.1 судно В является НЕМАНЕВРИРУЮЩИМ, длиной в 140 м, скорость его варьировалась в значениях:18, 13, 8, 3 и 0 уз. Маневрирующее судно А имеет также длину 140м, диаметр циркуляции 3.2 кбт., скорость его варьировалась в значениях:18, 13, 8 и 3 уз.
Таблица 1
|
VB→ |
0 уз. |
3 уз. |
8 уз. |
13 уз. |
18 уз. | |||||
|
VA↓ |
дист., кбт. |
время, мин. |
дист., кбт. |
время, мин. |
дист., кбт. |
время, мин. |
дист., кбт. |
время, мин. |
Дист., кбт. |
время, мин. |
|
3 уз. |
2.8 |
5.6 |
4.9 |
4.9 |
8.9 |
4.8 |
13.1 |
4.9 |
17.3 |
4.9 |
|
8 уз. |
2.8 |
2.1 |
3.5 |
1.9 |
4.9 |
1.8 |
6.3 |
1.8 |
7.9 |
1.8 |
|
13 уз. |
2.8 |
1.3 |
3.2 |
1.2 |
4.0 |
1.2 |
4.9 |
1.1 |
5.8 |
1.1 |
|
18 уз. |
2.8 |
0.9 |
3.1 |
0.9 |
3.7 |
0.9 |
4.3 |
0.8 |
4.9 |
0.8 |
Сравнительный анализ всех случаев расхождений судов с механическим двигателем различных размеров с различными скоростями в ситуации правила 14 показывает, что в каждом конкретном случае минимальное расстояние до опасного сближения, когда маневром только одного судна в этой ситуации можно избежать столкновения, существенно зависит от соотношения скоростей.
Однако, как показывает тот же анализ, минимальное время до опасного сближения, когда маневром только одного судна в этой ситуации можно избежать столкновения, несущественно зависит от соотношения скоростей, если маневрирует судно с большей скоростью или близкой к равной скорости другого судна.
Поэтому минимальное время до опасного сближения, когда маневром только одного судна можно избежать столкновения, может служить некоторым критерием степени опасности сближения для ситуаций неблагоприятного взаимного перемещения судов.
Конечно, судоводителю на мостике в реальных условиях плавания не представляется возможным работать непосредственно с таким критерием, но он может быть использован в действующих и
|
|
|
|
|
|
|
|
|
|
проектируемых автоматизированных системах решения задачи безопасного расхождения как на судах, так и для береговых систем. Отметим, что в приведенных примерах рассматривается только нижний предел допустимого маневра поворотом только одного судна, обусловленный только маневренными характеристиками и размерами судов. В реальной ситуации судоводители всегда учитывают массу других факторов: наличие других судов, наличие навигационных опасностей, состояние видимости. время реакции рулевого на подачу команды, время перекладки руля до заданного положения. Соответственно увеличивается время, когда надо отдать команду о начале маневрирования. В идеале маневр для безопасного расхождения должен быть предпринят настолько заблаговременно, чтобы в принципе не доводить ситуацию до того, чтобы приходилось применять такие предельные критерии. Литература |
| |
|
1. |
, Ламейер Дж. н. Толкование МППСС-72. - М.,Транспорт, 1981,280с. | |
|
2. |
Лентарев основы взаимодействия судопотоков: Владивосток, ДВГМА, 1999 – 102с. | |
|
3. |
О некоторых положениях рекомендаций ППСС-1960 по использованию РЛС для предупреждения столкновений судов: Морской флот, N5. - М.,1964,с.15-17. | |
|
4. |
Лихачев динамических характеристик судов при маневре курсом в системах предупреждения столкновений: Труды ЦНИИМФ, вып.247. - М.,1979,с.8-22. | |
|
5. |
К решению задачи об управлении судном при переходе с прямолинейного курса на циркуляцию: Труды Горьковскогоинститута инженеров водного транспорта, вып.197. - Горький,1983,с.11-29. | |
|
6. |
Управление крупнотоннажными судами. - М.,Транспорт,1986,229с. | |
|
7. |
Циркуляционное письмо MSC/Circ.644 от 01.01.01г.: Сборник резолюций №3 ИМО, С-Пб., ЦНИИМФ, 1995 – с.62-143. | |
|
8. |
Упрощенный метод оценки маневренности судов.:Нихон кокай гаккай ромунсю, вып.69,1983,с.41-48(перевод с японского). | |
|
9. |
Lijima Y., Honda K. Lane Width in a Harbour Passage: Journal of Navigation, vol.32,No 2,1979,p.186-199. | |
|
10. |
Lyster C. A.,Knights H. L. Prediction Eguations for Ship's Turning Circles: Trans. NE Coast Institute Engeneering and Shipbuilding, vol.94,No @4,1979,p.217-229. | |
АНАЛИЗ ПОЛОЖЕНИЙ, РЕГЛАМЕНТИРУЮЩИХ

|
Из за большого объема эта статья размещена на нескольких страницах:
1 2 3 4 5 6 7 |
