



Одним из недостатков серийного ГАК «Вега-М» является длительное время прихода в меридиан в режиме «Гирокомпас». Этот недостаток отсутствует у современных ГАК «Гюйс», «Меридиан», «PGM-C-009» у которых время прихода в меридиан в широте г. Владивостока (43,1°) составляет около 1 часа (для ГАК «Вега-М» – около 4 часов).
Современная система управления гироблоком позволяет изменять параметры ГАК «Вега-С»
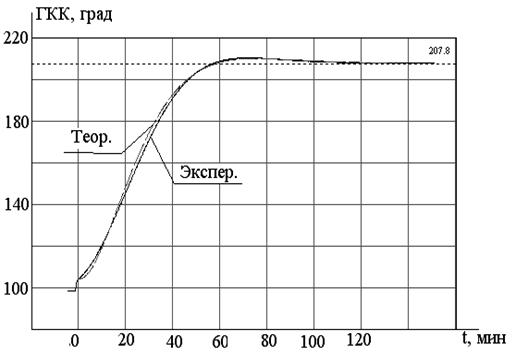
Целью работы является выявление возможности получить апериодический переходной процесс ГАК «Вега-С» с приемлемым перерегулированием (» 2%) и временем прихода в меридиан не более 1,5 часов (» 75 мин.).
Основными исходными параметрами можно принять время регулирования, т. е. время прихода в меридиан и фактор затухания.
Выражение для времени регулирования имеет вид [1]
 , (1)
, (1)
где ![]() – частота незатухающих колебаний,
– частота незатухающих колебаний, ![]() – коэффициент демпфирования (показатель затухания),
– коэффициент демпфирования (показатель затухания), ![]() – частота затухающих колебаний [2]. Тогда
– частота затухающих колебаний [2]. Тогда
 . (2)
. (2)
Фактор затухания вычисляется по формулам [3]
 . (3)
. (3)
Показатель затухания, коэффициент затухания, частота незатухающих колебаний и период соответственно равны [3]:
 ,
,  ,
,  ,
,  . (4)
. (4)
Модули маятникового и демпфирующего моментов равны соответственно [2]:
 , (5)
, (5)
где  – горизонтальная составляющая суточного вращения Земли,
– горизонтальная составляющая суточного вращения Земли, ![]() – угловая скорость суточного вращения Земли,
– угловая скорость суточного вращения Земли, ![]() – широта места, H – кинетический момент гироскопа. Соотношение модулей демпфирующего и маятникового моментов для ГАК «Вега-М» принято
– широта места, H – кинетический момент гироскопа. Соотношение модулей демпфирующего и маятникового моментов для ГАК «Вега-М» принято  .
.
Переходная функция звена при подаче на вход единичного ступенчатого воздействия (отклонения оси чувствительного элемента ГАК из меридиана – коэффициент k) и нулевых начальных значениях имеет вид
 , (6)
, (6)
В результате расчетов при tp=75 минут и факторе затухания f=50 получены следующие величины параметров ГАК «Вега-С»:  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Вид экспериментального переходного процесса и теоретического показан на рисунке 1.
Список использованных источников
1. Перминов, параметров двухрежимного корректируемого гирокомпаса [Текст] / Приборостроение, сб. научн. тр. № 000. Пермь: 1974. – С. 30–34.
2. Смирнов, средства судовождения: Теория: Учебник для вузов [Текст] / , , / Под ред. . – М.: Транспорт, 1988. – 376 с.
3. Коган, гироазимуткомпас «Вега» [Текст] / , . – М. : Транспорт, 1983. – 200 с.
ЗАВИСИМОСТИ ХАРАКТЕРИСТИК ТОЧНОСТИ ОМС
ОТ ВОЗВЫШЕНИЯ АНТЕННЫ ПРИЁМНИКА GP-37 НАД ГЕОИДОМ
,
МГУ им. адм. , г. Владивосток
В работе показано, что с помощью обсервованного возвышения антенны GPS-приёмника можно более детально исследовать характеристики точности определения места судна. Обнаружено, что при обсервованных возвышениях антенны, близких к точным её отстояниям от среднего уровня моря, средние квадратические погрешности плановых координат достигают минимальных значений. На основе полученных результатов разработан простой способ оперативной оценки текущей удвоенной средней квадратической погрешности ОМС.
Эксплуатацию судовых GPS-приёмников до сих пор сопровождает проблема оперативной оценки точности определения координат судна (ОМС). Обычно точность ОМС характеризуют удвоенной радиальной средней квадратической погрешностью (УРСКП). Эту характеристику получают в ходе продолжительных наблюдений при неподвижной антенне исследуемого GPS-приёмника. Полученная таким образом УРСКП является по сути дела обобщённой оценкой точности ОМС данного образца GPS-приёмника. Текущее значение РСКП зависит от азимутов и высот расположения спутников системы Навстар GPS, от чувствительности и быстродействия приёмника, от точности вычислительных алгоритмов программного обеспечения, от состояния трансионосферного канала распространения сигналов спутников. Следовательно, заранее полученная удвоенная радиальная средняя квадратическая погрешность не будет чувствительна к мгновенному состоянию перечисленных факторов.
На подвижном судне получение УРСКП крайне затруднено, так как чрезвычайно сложно выделить из процесса изменения мгновенных значений обсервованных широт и долгот составляющие, обусловленные неравномерностью вектора скорости судна, рысканием судна на курсе и качкой. В некоторых типах GPS-приёмников на экран индикатора выводится некий показатель точности, называемый неопределённостью (uncertaity). В технических описаниях таких приборов сообщается, что это средняя квадратическая погрешность определения текущего места судна. Однако алгоритма вычисления этого показателя не приводится, что ставит под сомнение обоснованность его применения.
С появлением GPS-приёмников в практику судовождения стал входить горизонтальный геометрический фактор (ГГФ). Величина ГГФ является косвенным показателем точности, так как отражает одним числом лишь геометрию расположения спутников относительно судна. На начальных этапах эксплуатации системы GPS в технических описаниях приёмников приводились номограммы, с помощью которых по величине текущего значения ГГФ (HDOP) рекомендовалось определять величину УРСКП. Исследования автора показали, что в действительности номограммы давали неверные результаты. Экспериментальные наблюдения за работой GPS-приёмников подтвердили предположение о том, что каждый тип приёмника вычисляет величины HDOP по уникальному алгоритму. Поэтому два приёмника разных типов на одном судне в один и тот же момент времени будут индицировать на своих экранах разные величины HDOP. Более того, такой приёмник, как J‑NAV500, отображал в течение нескольких суток величину HDOP = 1 в 99% и величину HDOP = 2 в 1% из 336957 наблюдений. Этот факт никак не свидетельствует о чувствительности HDOP.
Существует ещё один подход к оперативной оценке точности ОМС. Он заключается в предварительном получении статистической зависимости величины УРСКП от числа спутников, сигналы которых в данный момент используются GPS-приёмником для ОМС. Число таких спутников содержится в предложении $GPGGA стандарта NMEA 0183. Число используемых спутников можно также получить на соответствующей странице экрана любого GPS-приёмника. Этот способ оценки был предложен автором данной статьи. Способ просто реализуется даже без применения вычислительной техники. Достаточно иметь возле GPS-приёмника номограмму, отражающую регрессионную зависимость УРСКП от числа используемых в данный момент спутников. И если бы этот способ оценки точности отличался чувствительностью, то его следовало бы развивать дальше.
Цель данной статьи заключается в описании нового способа оперативной оценки УРСКП, который обладает высокой чувствительностью к перечисленным ранее факторам, влияющим на точность ОМС с помощью судового GPS-приёмника.
Перечисленные выше факторы вызывают погрешности определения широты, долготы и возвышения антенны над поверхностью геоида. На движущемся судне точные значения широты и долготы в любой момент времени знать невозможно. Вместе с широтой и долготой непрерывно изменяется и обсервованное возвышение антенны над геоидом. В отличие от обсервованных плановых координат точное значение возвышения всегда известно. В первом приближении возвышение антенны судового GPS-приёмника над геоидом – это отстояние по вертикали фазового центра антенны над средним уровнем моря на данной акватории. Ранее автором данной статьи была обнаружена корреляционная зависимость между координатами GPS-приёмника. Следовательно, если заранее получить зависимости СКП широты и долготы от обсервованного возвышения антенны, то, используя эту зависимость, в любой момент времени на судне по обсервованному возвышению можно рассчитать текущее значение РСКП.
Для получения искомых зависимостей были использованы данные экспериментальных наблюдений за работой приёмника GP-37, выполненных автором осенью 2006 года на базе высокоточного GPS‑полигона Артёмовской топографо-геодезической экспедиции (ФГУП “ПриморАГП”). Из полученных данных для каждого значения возвышения от 58 до 70 метров были сформированы 13 массивов, состоящих из соответствующих им пар значений обсервованных широт и долгот. Массивы, соответствующие возвышениям более 70 и менее 58 метров, не формировались, поскольку там объёмы выборок были меньше 11000 пар широт и долгот. Затем по каждому массиву были рассчитаны СКП широт и долгот, выраженных в минутах и в метрах, а также удвоенные радиальные СКП в метрах. Результаты этих вычислений можно видеть в табл. 1.
Таблица 1
Характеристики точности обсервованных широт и долгот приёмника GP-37
|
Возвышение антенны |
Объём выборок |
СКП широты |
СКП долготы |
УРСКП, метры | ||
|
минуты |
метры |
минуты |
метры | |||
|
58 |
11097 |
0,000889 |
1,646 |
0,000855 |
1,155 |
4,021 |
|
59 |
20671 |
0,000811 |
1,502 |
0,000741 |
1,001 |
3,611 |
|
60 |
59719 |
0,000706 |
1,307 |
0,000759 |
1,025 |
3,323 |
|
61 |
72311 |
0,000691 |
1,279 |
0,000744 |
1,005 |
3,253 |
|
62 |
160697 |
0,000711 |
1,317 |
0,000786 |
1,062 |
3,385 |
|
63 |
240300 |
0,000735 |
1,361 |
0,000799 |
1,079 |
3,474 |
|
64 |
223757 |
0,000757 |
1,403 |
0,000749 |
1,013 |
3,459 |
|
65 |
350961 |
0,000730 |
1,352 |
0,000705 |
0,953 |
3,307 |
|
66 |
248027 |
0,000707 |
1,309 |
0,000670 |
0,905 |
3,182 |
|
67 |
258774 |
0,000702 |
1,299 |
0,000666 |
0,899 |
3,161 |
|
68 |
127851 |
0,000732 |
1,355 |
0,000682 |
0,922 |
3,277 |
|
69 |
39305 |
0,000752 |
1,393 |
0,000725 |
0,980 |
3,406 |
|
70 |
20765 |
0,000651 |
1,205 |
0,000748 |
1,010 |
3,144 |
Для анализа полученных результатов обратимся к рис. 1. На нём на левой панели представлен график изменения СКП широты в метрах в зависимости от возвышения антенны. Вертикальная пунктирная линия соответствует точному значению возвышения. На правой панели рис. 1 показан аналогичный график изменения СКП долготы.
На графиках явно прослеживается общая тенденция уменьшения СКП плановых координат с увеличением значений возвышения антенны. Зависимость СКП широты и долготы имеют нелинейный характер. В ходе экспериментальных наблюдений получены большие объёмы выборок. Поэтому нельзя признать характер изменения обсуждаемых СКП случайным. Несомненно, здесь имеет место закономерность, которая нуждается в дополнительных исследованиях. Ранее предполагалось, что СКП широты и долготы должны иметь минимум, строго соответствующий точному значению возвышения антенны. На графиках видно, что полного совпадения не происходит. Можно видеть два минимума СКП у широты и у долготы. Как для широты, так и для долготы они приходятся практически на одни и те же значения возвышения антенны.
Рис. 1. Зависимость СКП широты и долготы от возвышения
Величины средних квадратических погрешностей широты и долготы, полученные в результате обработки всех данных наблюдений осенью 2006 года, равны 1,355 м и 0,983 м соответственно. Как следует из табл. 1, размах варьирования СКП широты равен 0,441 м, а СКП долготы – 0,255 м. Следовательно, вариация СКП широты составила 32,5% от величины, полученной по всем данным, а долготы – 25,9%. Такие значения вариаций средних квадратических погрешностей широты и долготы подтверждают обоснованность подхода к оценке текущей точности ОМС по величине обсервованного возвышения антенны. Рассматриваемый подход обладает способностью оценить даже незначительные величины СКП плановых координат.
На рис. 2 представлен график изменения удвоенной радиальной СКП обсервованного места судна, полученного с помощью GPS‑приёмника GP-37. Как можно видеть, наибольшее значение погрешности (4,021 м) с вероятностью 0,95 приходится на возвышение антенны 58 м. Наименьшее значение погрешности ( 0,899 м) наблюдается при возвышении 67 м. Величины удвоенной радиальной СКП также, как и СКП плановых координат, имеют общую тенденцию к уменьшению по мере приближения возвышения к своему истинному значению. Величины удвоенной радиальной СКП определения места судна с помощью приёмника GP-37 не превышают 5 м.
Рис. 2. Зависимость УРСКП от возвышения антенны
Доказательством достоверности полученных результатов может служить тот факт, что на диапазон возвышений антенны от 58 м до 70 м, зарегистрированных в ходе эксперимента, приходится 99,28% от всех наблюдений.
Приёмник GP-37 отображает на экране индикатора и выводит на внешние устройства обсервованные возвышения с разрядностью 1 м. Следовательно, ближайшим целым точным значением возвышения будет 65 м. В действительности на судне таких возвышений антенны не может быть. Чтобы распространить результаты проделанных исследований на область практического применения, надо задаваться не абсолютным значением возвышения, а разностью (Δ) между текущим обсервованным возвышением и его точным значением. В судовых условиях точным значением будет отстояние антенны судового приёмника от среднего уровня моря. Если на судне эксплуатируется приёмник GP-37, то для получения удвоенной радиальной СКП можно воспользоваться табл. 2.
Таблица 2
Таблица величин удвоенных радиальных СКП определения места судна с помощью GPS-приёмника GP-37
|
Δ, м |
УРСКП, м |
Δ, м |
УРСКП, м |
Δ, м |
УРСКП, м |
|
– 7 |
4,021 |
– 2 |
3,474 |
3 |
3,277 |
|
– 6 |
3,611 |
– 1 |
3,459 |
4 |
3,406 |
|
– 5 |
3,323 |
0 |
3,307 |
5 |
3,144 |
|
– 4 |
3,253 |
1 |
3,182 | ||
|
– 3 |
3,385 |
2 |
3,161 |
В заключении надо отметить, что предложенный способ оперативной оценки точности ОМС применим только для приёмника GP‑37. Чтобы эту методику распространить на другие приёмники СРНС Навстар GPS, необходимы дальнейшие исследования.
ОСНОВЫ ТЕОРИИ БОЛЬШОГО ЭЛЛИПСА
, ,
МГУ им. адм. , г. Владивосток
В статье доказано, что при пересечении земного эллипсоида плоскостью, проходящей через центр эллипсоида, образуется фигура в виде эллипса. Получено выражение, с помощью которого можно рассчитать величину малой полуоси такого эллипса.
Появление на судах персональных компьютеров и специализированных пакетов программ вызвало постановку и решение новых штурманских задач. К числу таких следует отнести навигационную задачу расчётов при плавании по дуге большого эллипса. Большим эллипсом считается след на поверхности земного эллипсоида (референц-эллипсоида) от пересечения его плоскостью, проходящей через две точки на его поверхности и центр. Если секущая плоскость совпадает с плоскостью меридиана, то таким следом будет меридианный эллипс. Когда же секущая плоскость совпадает с плоскостью экватора, то образуется окружность радиуса, равного большей полуоси земного эллипсоида. При прохождении секущей плоскости под острым углом к плоскости экватора на поверхности эллипсоида образуется фигура, большая полуось которой всегда равна большей полуоси земного эллипсоида, а меньшая полуось будет больше меньшей полуоси земного эллипсоида, но меньше его большей полуоси. Такую фигуру на интуитивном уровне принимают за эллипс. Данная статья посвящена доказательству этого факта.
Рассмотрим сечение трехосного эллипсоида плоскостью
или, если привести уравнение плоскости к нормальному виду, то
 , (1)
, (1)
где ![]() – длина перпендикуляра, опущенного из начала координат на плоскость,
– длина перпендикуляра, опущенного из начала координат на плоскость,  – углы, образованные этим перпендикуляром с осями координат.
– углы, образованные этим перпендикуляром с осями координат.
Углы ![]() определяются следующим образом:
определяются следующим образом:
Обратим внимание, что ![]() , откуда
, откуда ![]() .
.
Выберем новый базис следующим образом. Новую аппликату направим по нормали к плоскости, то есть ![]() .
.
Так как ![]() , то
, то
 .
.

 .
.
Тогда формулы перехода к новому базису будут иметь вид
 .
.
Так как базис ортонормированный, то формулы обратного перехода
откуда видно (1), что в новой системе координат секущая плоскость будет описываться уравнением  .
.
Найдем уравнение эллипсоида в новой системе координат.

 ,
,



![]() ,
,


 .
.
В плоскости сечения ![]() , поэтому уравнение кривой будет иметь вид
, поэтому уравнение кривой будет иметь вид


 .
.
Найдем второй инвариант этой кривой





 .
.
А это означает, что в сечении всегда будет получаться эллипс (действительный или мнимый в зависимости от параметра ![]() ).
).
Если рассмотреть сечение эллипсоида вращения (земного эллипсоида),  то, учитывая что
то, учитывая что ![]() и
и  , уравнение кривой в сечении получим в виде
, уравнение кривой в сечении получим в виде

Если же сечение при этом будет проходить через центр (в этом случае ![]() ), то уравнение кривой в сечении примет вид
), то уравнение кривой в сечении примет вид
 . (2)
. (2)
Выражение (2) представляет собой уравнение эллипса. Следовательно, след от пересечения земного эллипсоида плоскостью, проходящей через его центр, является эллипсом с большой полуосью ![]() и малой полуосью
и малой полуосью ![]() ,
,
 (3)
(3)
где ![]() – первый эксцентриситет меридианного эллипса.
– первый эксцентриситет меридианного эллипса.
Проанализируем полученное выражение (3) для малой полуоси ![]() . Когда секущая плоскость совпадает с плоскостью экватора земного эллипсоида (γ = 0°), то
. Когда секущая плоскость совпадает с плоскостью экватора земного эллипсоида (γ = 0°), то ![]() Когда секущая плоскость совпадает с плоскостью меридиана (γ = 90°), то
Когда секущая плоскость совпадает с плоскостью меридиана (γ = 90°), то ![]() так как
так как ![]() Когда 0° < γ < 90°, то
Когда 0° < γ < 90°, то  что и требовалось доказать.
что и требовалось доказать.
ОЦЕНКА ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ СКОРОСТИ GPS-ПРИЁМНИКОМ SPR-1400
,
МГУ им. адм. , г. Владивосток
В результате обработки экспериментальных наблюдений за работой GPS-приёмников SPR-1400 и GP-37 на маневрирующем судне обнаружено влияние ускорений на точность определения абсолютной скорости приёмником SPR‑1400.
Так как штатные лаги на судах характеризуются низкой функциональной надёжностью, то штурманы зачастую в качестве измерителя скорости используют GPS-приёмник. Судовые приёмники спутниковой радионавигационной системы (СРНС) Навстар GPS эксплуатируются уже более 20 лет. Тем не менее, до сих пор отсутствуют теоретические и экспериментальные работы, которые бы закладывали научную основу создания методов эксплуатации приёмника СРНС Навстар GPS в качестве лага. Главная причина создавшегося положения дел кроется в сложности постановки экспериментов с целью получения обширного статистического материала о погрешностях GPS-приёмников в широком диапазоне скоростей судов. Данная статья вносит вклад в решение этой проблемы.
В работе [1] объяснены причины возникновения погрешностей измерения модуля вектора абсолютной скорости GPS-приёмником, а также проанализированы способы проведения экспериментальных наблюдений. Среди рассмотренных предложен способ параллельных наблюдений за работой двух GPS-приёмников, один из которых определяет скорость заведомо точнее другого. Первой попыткой постановки такого эксперимента были наблюдения, выполненные автором в августе-сентябре 2004 года на научно-исследовательском судне “Внимательный” Института биологии моря ДВО РАН в заливе Петра Великого. Сравнивались показания абсолютных скоростей приёмников GP-270ML компании Icom и GPS-128 компании Garmin в условиях волнения моря [2] и на тихой воде [3]. Вторая и третья попытки были предприняты в сентябре 2005 года и в августе-сентябре 2007 года на борту учебной научно-исследовательской лаборатории “Галс”, принадлежащей кафедре технических средств судовождения МГУ им. адм. [4]. В последних экспериментах участвовали GPS-приёмники GP-270ML и GP‑37 компании Furuno. К сожалению, полученный статистический материал нельзя было использовать для оценки погрешностей определения скорости приёмниками, так как, во-первых, были не известны характеристики абсолютных погрешностей одного из них, во-вторых, измерения проводились только на полном ходу.
С вводом в эксплуатацию дифференциальной станции на мысе Поворотном эксперименты по оценке погрешностей стали возможны. Поэтому летом 2008 года автором был предпринят сбор статистического материала с одновременным участием судовых приёмников GP-37, GP‑270ML и SPR-1400 компании Samyung (Республика Корея). В последнем рейсе участвовал геодезический приёмник Leica GPS 1220GG, принимавший сигналы спутников СРНС Навстар GPS и Глонасс. Работы проводились с 11 июля по 5 сентября на борту пассажирского парома “Бригадир Ришко”, который совершал регулярные рейсы на острова Русский (Канал и Подножье) и Попова (б. Западная) от 36 причала бухты Золотой Рог. Паром в качестве места сбора статистического материала был выбран из-за частых отходов от причалов и швартовок, во время которых за короткие промежутки времени скорость изменялась от нуля до скорости полного хода.
Данные от приёмников GP-37, GP-270NL и Leica GPS 1220GG автоматически записывались на жёсткий диск ноутбука. Приёмник SPR‑1400 принадлежал парому и входил в комплект аппаратуры АИС. Поэтому к выходу этого приёмника подключить ноутбук не представлялось возможным. Для сбора материала о модуле вектора абсолютной скорости SPR-1400 применялся ручной способ фиксации. Так как на экран индикатора этого приёмника текущее время с точностью до одной секунды не выводилось, то синхронизация ручных записей выполнялась с помощью секундомера. Секундомер запускался в момент начала нулевой секунды новой минуты, ближайшей к началу отхода парома от причала или к моменту начала уменьшения хода перед швартовкой. Ручные фиксации значений скорости приёмника SPR-1400 производились в моменты времени, кратные 5 секундам. Всего было зарегистрировано 7850 значений скорости приёмника SPR-1400 во всём диапазоне скоростей в ходе 64 швартовок и отходов от причалов.
Приёмник GP-270ML не измеряет скорости менее 1 уз, поэтому его показания в данном исследовании не рассматривались. Приёмник GP‑37 работал в дифференциальном режиме, а SPR-1400 – в автономном. Поэтому априори точность определения координат и скорости приёмником GP-37 была принята выше, нежели приёмника SPR-1400. Исходя из этого, в качестве эталонных значений скорости принимались скорости, измеренные приёмником GP-37. Погрешность измерения скорости приёмником SPR-1400 (Δ) в данном исследовании определялась как разность между скоростью приёмника SPR-1400 (vS) и скоростью приёмника GP-37 (vG), 
Из опыта эксплуатации гидродинамических и индукционных лагов следует, что их поправки находятся в нелинейной зависимости от скорости судна. Исправление пройденного расстояния поправкой лага на маневрирующем скоростью судне представляет сложную задачу. Поправка лага удобна только для постоянной скорости судна. Технологии применения приёмников СРНС Навстар GPS основывается на использовании мгновенного состояния вектора абсолютной скорости. Поэтому при рассмотрении точности определения скорости GPS-приёмником будем оперировать погрешностью Δ, рассматривая зависимость её от мгновенного значения скорости судна, т. е. Δ = f(vG) . С этой целью для каждого (j) значения скорости приёмника GP-37 были рассчитаны средние значения погрешностей (ΔCPj) и средние квадратические отклонения (СКОj) скорости приёмника SPR-1400 по формулам
 (1)
(1)
где nj – число наблюдений скорости приёмника SPR-1400, соответствующих j-тому значению скорости приёмника GP-37. Результаты вычислений представлены на рис. 1.
Рис. 1. Графики средних погрешностей (левая панель) и средних квадратических отклонений (правая панель) скорости SPR-1400
На рис. 1 видно, как средняя погрешность абсолютной скорости SPR-1400 сначала увеличивается, в диапазоне скоростей от 3 до 8 уз приближается к нулю, а затем начинает уменьшается. Характер такого изменения представлен полиномиальной регрессией второй степени (пунктирная линия). Если подойти к обнаруженному факту формально, то можно сделать вывод о явном улучшении точности определения абсолютной скорости приёмником SPR‑1400 в диапазоне 3 – 8 уз. В то же время на этот диапазон скоростей приходятся наибольшие значения случайных погрешностей (правая панель). Эти факты вступают в явное противоречие с выводами, полученными ранее в работах [1, 5].
Чтобы продолжить анализ данного противоречия, обратимся к гистограмме рис.2 (левая панель). На ней видно, что за всё время экспериментальных наблюдений на долю зарегистрированных скоростей в диапазоне 3 – 8 уз приходится незначительное число наблюдений. Следовательно, сравнения скоростей на маневрирующем судне дают в итоге неравноточные наблюдения из-за медленной сходимости точечных оценок СКО. Наибольшее число зарегистрированных скоростей приходится на диапазоны от 0 до 2,5 уз и от 8,3 до 9,6 уз. Поэтому СКО погрешностей в диапазоне от 3 до 8 уз имеет значительное рассеивание, что не позволяет сделать обоснованный вывод о характере регрессионной зависимости СКО от величины скорости.
Причину неравноточных наблюдений можно объяснить, анализируя график правой панели рис. 2. На ней представлен типичный график изменения скорости парома во время швартовки. Этот график построен по результатам наблюдений во время швартовки к 36 причалу 30 июля 2008 года. В ходе швартовок к причалам и отходов от причалов за короткий промежуток времени скорость парома в диапазоне от 2,5 до 8,3 уз меняется быстро, то есть, в этом диапазоне скорость существенно возрастает или замедляется.
Рис. 2. Гистограмма распределения зафиксированных скоростей (слева) и характер изменения скорости во время швартовки
На графиках рис. 1 видно, что значения средних погрешностей и СКО приёмника SPR-1400 для минимальных и максимальных величин абсолютной скорости практически одинаковы. Как только что установлено, в этом диапазоне скорость парома изменяется незначительно. Следовательно, средняя погрешность абсолютной скорости и СКО скорости этого приёмника зависят от ускорения, с которым движется судно.
Чтобы подтвердить данное предположение, сначала были рассчитаны по абсолютной величине ускорения по данным, полученным от приёмника GP-37 как
 (2)
(2)
где k – порядковый номер значения скорости приёмника GP-37 в данном подходе или отходе от причала, ![]() n – число зарегистрированных значений скорости в данной серии наблюдений, Δt равно 5 секундам. Размерность вычисляемых ускорений – уз/с2 . 1 уз/с2 равен 0,51444 м/с2. Понятно, что минимальное значение ускорения равно 0, а число их значений конечно.
n – число зарегистрированных значений скорости в данной серии наблюдений, Δt равно 5 секундам. Размерность вычисляемых ускорений – уз/с2 . 1 уз/с2 равен 0,51444 м/с2. Понятно, что минимальное значение ускорения равно 0, а число их значений конечно.
Обозначим через l данное значение ускорения. Для каждого такого значения ускорения были выбраны соответствующие им погрешности скорости приёмника SPR-1400, ![]() Так были сформированы шесть массивов. Затем по каждому такому массиву были рассчитаны средние значения погрешностей приёмника SPR-1400,
Так были сформированы шесть массивов. Затем по каждому такому массиву были рассчитаны средние значения погрешностей приёмника SPR-1400,
 (3)
(3)
где m – объём массива, соответствующего значению ускорения l.
График зависимости среднего значения погрешности (3) от ускорения (2) представлен на левой панели рис. 3.
Рис. 3. Зависимости средней скорости от ускорения (слева) и средней скорости SPR-1400 от скорости приёмника GP-37
Линейное регрессионное выражение, связывающее среднее значение погрешностей приёмника SPR-1400 ΔСР и абсолютное ускорение, полученное по наблюдениям за работой приёмника GP-37 aG (3), представлено формулой (4).
![]() (4)
(4)
На графике видно, что в диапазоне ускорений от 0 до 0,1 уз/с2 статистическая связь близка к линейной. Это вовсе не означает сохранение линейной зависимости при дальнейшем увеличении ускорения. Средняя погрешность приёмника SPR-1400 меняет свой знак при значении ускорения 0,071 уз/с2 (0,0365 м/с2).
Далее анализировался вид зависимости средней скорости SPR-1400 ![]() (1) от соответствующей ей скорости GP-37. График этой зависимости представлен на правой панели рис. 3. Графику соответствует линейное регрессионное выражение (5).
(1) от соответствующей ей скорости GP-37. График этой зависимости представлен на правой панели рис. 3. Графику соответствует линейное регрессионное выражение (5).
![]() (5)
(5)
Коэффициент при ![]() , практически равный единице, и отрицательный свободный член выражения (5) свидетельствуют о том, что скорость, определяемая приёмником SPR-1400, всегда на 0,0302 уз меньше на всём диапазоне зарегистрированных скоростей.
, практически равный единице, и отрицательный свободный член выражения (5) свидетельствуют о том, что скорость, определяемая приёмником SPR-1400, всегда на 0,0302 уз меньше на всём диапазоне зарегистрированных скоростей.
К сожалению, полученные результаты не позволяют пока сделать однозначного вывода о том, какой из приёмников точнее определяет абсолютную скорость, так как требуется знать абсолютные погрешности приёмника GP-37.
В заключении автор хотел бы выразить признательность капитанам парома ”Бригадир Ришко” и за содействие в проведении экспериментов.
Литература
1. Комаровский проблемы оценки точности измерения скорости судовым GPS-приёмником // Транспортное дело России. Специальный выпуск № 3. – Москва, 2005. – С. 103 – 108.
2. Комаровский волнения моря на точность измерения абсолютной скорости GPS-буёв // Материалы междунар. научн.-практ. конф. “Морская экология” (“MAREC–2005”). 5–7 окт. 2005 г. Том I. – Владивосток: МГУ им. адм. , 2006. – С. 119 – 123.
3. Комаровский анализ синхронного измерения абсолютной скорости двумя приёмниками СРНС Навстар GPS // Вестник Морского государственного университета. Вып. 9. Серия: Судовождение.– Владивосток: Мор. гос. ун-т, 2005. – С. 66 – 71.
4. Комаровский элементов поверхностного течения с помощью эпюры абсолютной скорости судна // Материалы межд. науч.-практ. конф. “Морская экология-2007”, 3-5 окт. 2007 г. Том II. – Владивосток: МГУ им. адм. Невельского, 2007. – с. 70 – 81.
5. Комаровский анализ зависимости случайных погрешностей измерения абсолютной скорости приёмником GP-37 на ходу судна // Вестник Морского государственного университета. Вып. 23. Серия: Судовождение. – Владивосток: Мор. гос. ун-т, 2008. – С. 26 – 30.
ПОСТОЯННЫЕ ПОГРЕШНОСТИ КООРДИНАТ GP-37
,
МГУ им. адм. , г. Владивосток
Оценены постоянные погрешности координат по результатам обработки 3-недельных непрерывных наблюдений. Обнаружено превышение величины постоянной погрешности над средней квадратической погрешностью долготы, а также влияние низкочастотных колебаний координат GPS-приёмника.
Содержащиеся в технических описаниях судовых GPS-приёмников сведения о точности определения координат крайне ограничены и расплывчаты. Порой приводятся сомнительные оценки точности, статистический смысл которых не раскрывается. Приводимые характеристики оценивают только случайные погрешности, но не отражают вклада постоянных погрешностей широты, долготы и возвышения антенны в общие погрешности.
Рассмотрим аддитивную модель общей погрешности определения обсервованных координат на примере широты. Пусть φ0 – истинное значение широты, в которой находится антенна неподвижного GPS-приёмника, φ – измеренное значение широты, φр – центрированное значение случайной погрешности измеренной широты, Δ – постоянная погрешность измерения. Тогда
 (1)
(1)
Пусть случайная величина φр имеет унимодальную плотность распределения f(φр) с математическим ожиданием mφ = 0 и средним квадратическим отклонением σφ ≠ 0. Чтобы раскрыть смысл модели (1), применим к ней оператор математического ожидания M.

По определению M(φp) = mφ = 0. Математические ожидания φ0 и Δ M(φ0) = φ0 , M(Δ) = Δ , так как математическое ожидание постоянной величины равно этой величине. Отсюда
 (2)
(2)
Следовательно, постоянная погрешность обсервованной широты антенны GPS-приёмника определяется разностью между математическим ожиданием обсервованной широты и её истинным значением.
На первых этапах эксплуатации спутниковой радионавигационной системы (СРНС) Навстар GPS к оценкам постоянных погрешностей интерес со стороны исследователей не проявлялся. Объяснялось это тем, что средние квадратические погрешности (СКП) широт и долгот составляли порядка 30 м и 27 м соответственно. Предполагалось также значительное превышение величин случайных погрешностей над величинами постоянных. В наши дни, когда отсутствует режим избирательной доступности, СКП обсерваций не превышают 2 м. Поэтому вполне закономерным будет исследование величин постоянных погрешностей обсервованных координат современных GPS-приёмников.
Вычисления постоянной погрешности Δ по формулам (2) связано с получением необходимого и достаточного объёма выборки n , которая обеспечивает сходимость по вероятности среднего значения обсервованной широты к её математическому ожиданию, то есть,
 (3)
(3)
где ε – наперёд заданное положительное число, ε << 1 .
Связь между средним и математическим ожиданием устанавливает закон больших чисел в форме ряда теорем. Достаточность для выполнения сходимости (3) устанавливают теоремы . Наиболее часто в прикладных исследованиях ссылаются на обобщённую теорему : при неограниченном увеличении числа независимых испытаний над случайными величинами, имеющими ограниченные дисперсии, среднее арифметическое наблюдаемых значений сходится по вероятности к среднему арифметическому математических ожиданий этих величин [1], то есть,
 (4)
(4)
Если накладываемые на дисперсии условия выглядят вполне естественными, то условие независимости случайных величин делает обобщённую теорему не применимой для исследования сходимости обсервованных координат GPS-приёмников. В работах [2-4] показано, что в обсервованных координатах неподвижной антенны GPS-приёмников присутствует монотонный тренд.
Сравнительно недавно было получено необходимое и достаточное условие для применимости закона больших чисел к последовательности произвольных случайных величин [5]. Была доказана следующая теорема: чтобы для последовательности φ1, φ2, φ3, … как угодно зависимых случайных величин при любом положительном ε выполнялось соотношение (4), необходимо и достаточно, чтобы при n → ∞
 (5)
(5)
Нетрудно убедиться, что сходимость к 0 условия (5) зависит от числа наблюдений. Это создаёт базу оптимизма для применения формул (2) в целях определения постоянных погрешностей обсервованных координат.
Экспериментальные наблюдения для получения статистического материала, необходимого для вычисления постоянных погрешностей GPS-приёмника GP-37, выполнялись автором с 25 сентября по 17 октября 2006 года на высокоточном GPS-полигоне Артёмовской топографо-геодезической экспедиции (ФГУП “ПриморАГП”). Выбор места проведения эксперимента объяснялся наличием фундаментального пункта астрономо-геодезической сети. Данный пункт в середине 2006 года прошёл государственную сертификацию, а его координаты в геодезической системе координат WGS-84 были определены с прецизионной точностью. Поскольку точность координат пункта на три порядка превосходили точность определения координат приёмника GP-37, то координаты пункта в данном исследовании принимались в качестве истинных. Антенна приёмника GP-37 во время эксперимента устанавливалась стационарно на геодезическом штативе недалеко от пункта. Координаты антенны были привязаны к координатам пункта с помощью теодолита 3Т5КП с точностью не хуже ± 1 см. Данные от приёмника GP-37 ежесекундно автоматически записывались на жёсткий диск ноутбука в стандарте NMEA 0183. В ходе предварительной обработки полученного материала был сформирован массив из 1847558 строк, каждая из которых содержала дату, время UTC, широту, долготу и возвышение антенны над поверхностью референц-эллипсоида WGS-84.
Вычисление постоянных погрешностей не было единственной целью обработки сформированного массива. Важно также было получить характеристики сходимости. Поэтому расчёты постоянных погрешностей и СКП (σ) в метрах широты и долготы выполнялись по мере увеличения времени с начала наблюдений на каждый целый час. Расчёты на примере широты проводились по следующим формулам:
 (6)
(6)
где j – целое число часов с начала наблюдений, j = 1, 2, 3, … ; φjcp – средняя широта, рассчитанная за j часов с начала наблюдений; Δj – постоянная погрешность широты, рассчитанная за j часов с начала наблюдений; lm – длина в метрах одной минуты меридиана в средней широте; σj – СКП широты, рассчитанная за j часов с начала наблюдений.
Графики сходимости постоянных погрешностей широты и долготы, а также графики сходимости их СКП, полученные в ходе обработки полученного массива данных, представлены на рис. 1 и 2 соответственно.
Рис. 1. Сходимость постоянных погрешностей широты и долготы
Рис. 2. Сходимость СКП широты и долготы
На рисунках прослеживается влияние суточных изменений координат и их СКП. Статистическая устойчивость постоянных погрешностей и СКП начинается приблизительно через 450 часов (19 суток). Кроме того, наблюдаются низкочастотные изменения с периодом приблизительно 24 суток. Это хорошо видно на рис. 3. На нём слева представлен график сходимости постоянной погрешности возвышения антенны над поверхностью референц-эллипсоида WGS-84. Справа изображён тот же процесс сходимости в увеличенном масштабе за счёт отбрасывания снизу размаха варьирования переменной. На правом графике отчётливо проявляются суточные и низкочастотные колебания возвышения.
Рис. 3. Сходимость постоянной погрешности возвышения антенны
На правом графике рис. 3 видно, как по мере накапливания данных уменьшаются амплитуды суточных и низкочастотных колебаний. Отсюда следует, что полученные за весь период наблюдений величины постоянных погрешностей и СКП будут изменяться, если продолжить экспериментальные наблюдения. Чтобы показать медленную сходимость, были рассчитаны постоянные погрешности и СКП координат за каждую из трёх недель наблюдений и за весь период наблюдений. Результаты вычислений сведены в табл. 1.
Таблица 1.
Полученные за различные периоды наблюдений постоянные погрешности и СКП координат
|
Период наблюдений |
Широта |
Долгота |
Возвышение | |||
|
Δ, м |
σ, м |
Δ, м |
σ, м |
Δ, м |
σ, м | |
|
I неделя |
0,461 |
1,354 |
1,399 |
0,954 |
– 0,636 |
2,549 |
|
II неделя |
0,362 |
1,298 |
1,394 |
0,921 |
– 0,615 |
2,333 |
|
III неделя |
0,269 |
1,401 |
1,341 |
1,062 |
– 0,572 |
2,384 |
|
Весь период |
0,362 |
1,355 |
1,378 |
0,983 |
– 0,457 |
2,423 |
Анализ табл. 1 позволяет сделать следующие выводы.

|
Из за большого объема эта статья размещена на нескольких страницах:
1 2 3 4 5 6 7 |
