


|
|
|
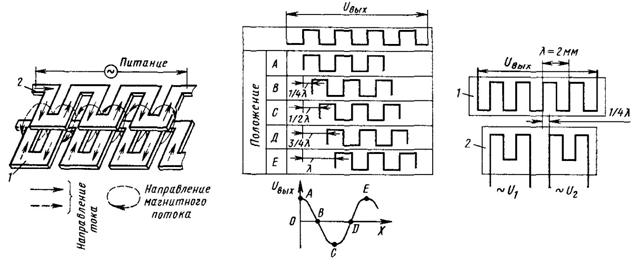
Рисунок 1.12 –Линейный индуктосин
а) взаимное расположение обмоток индуктосина; б) напряжение на выходе при сдвиге головки относительно шкалы; в) обмотки шкалы (1) и головки (2)
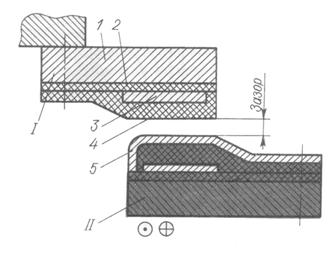
Рисунок 1.13 – Устройство линейного индуктосина
При амплитудной модуляции обмотки возбуждения на головке питаются синусоидальными напряжениями U1, U2, совпадающими по фазе, но разной амплитуды, определяемой заданным углом φ°.
![]() ;
;  ,
,
где Um – амплитудное значение напряжения питания; t – время; ω – скорость вращения.
При сдвиге (или повороте) головки относительно шкалы в пределах шага шкалы напряжение на выходе изменяется по синусоидальному закону:
![]() ,
,
где k – коэффициент трансформации; р – число пар полюсов преобразователя (для кругового индуктосина р = 180, а для линейного р = 1); φ – для кругового индуктосина равен углу поворота ротора относительно статора (для линейного, индуктосина это угол в электрических градусах: φ = 360°; ![]() ); х – величина перемещения; λ – период обмотки (рис. 1.12, в).
); х – величина перемещения; λ – период обмотки (рис. 1.12, в).
В режиме фазовой модуляции обмотки возбуждения питаются напряжением переменного тока равной амплитуды, но сдвинутыми по фазе на 90°. При этом выходное напряжение также определяется приведенным соотношением. Индуктосин не имеет ферромагнитной системы, и для увеличения выходного сигнала частота питания принимается равной нескольким килогерцам. С резольвером, индуктосином, так же как и с импульсным ИП, могут работать большинство микропроцессорных устройств ЧПУ.
Индуктивные сенсоры
Принцип действия индуктивных конечных выключателей основывается на взаимодействии металлического проводника с его электромагнитным переменным полем. В проводнике индуктируются вихревые токи, которые отнимают энергию у поля и тем самым снижают амплитуду колебаний. Это изменение обрабатывается индуктивным сенсором, который соответственно изменяет свое состояние на выходе.
Функциональные группы индуктивного сенсора должны включать в себя: поле сенсора, катушку, сердечник; генератор; демодулятор; триггер; усилитель (рис. 1.14).
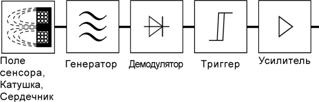
Рисунок 1.14 – Принципиальная схема работы и подключения индуктивного сенсора
Активная поверхность – это область, через которую высокочастотное поле сенсора вступает в контакт с окружающей атмосферой. Она в первую очередь определяется основной поверхностью сердечника и примерно соответствует поверхности колпачка (крышки) сердечника. Измерительная – пластина квадратная пластина из стали (Fe 360, ISO 630).
Индуктивные выключатели наиболее эффективно использовать в качестве конечных выключателей в автоматических линиях, станках и т. п., т. к. они срабатывают только на проводящие материалы и не чувствительны ко всем остальным. Это увеличивает их защищенность от помех – введение в зону чувствительности выключателя рук оператора, эмульсии, воды, смазки и т. д. не приведет к ложному срабатыванию. В качестве управляющего объекта для индуктивных выключателей используются такие металлические конструктивы, как зубья шестерен, кулачки, ползуны; часто это металлическая пластина, прикрепленная к соответсвующей детали оборудования. Для настройки расстояния воздействия применяют пластину из стали, толщиной 1 мм. Пластина имеет форму квадрата со стороной более или равной значению диаметра выключателя. В случае применения конструктивов не из стали, а из других металлов, вводятся поправочные коэффициенты:
Чугун – 1,1
Хром-никель – 0,9
Латунь – 0,4
Аллюминий – 0,35
При установке индуктивных выключателей в реальную конструкцию, следует учитывать влияние окружающих неподвижных металлических элементов и других индуктивных выключателей.
Устройство индуктивного датчика приведено на рис. 1.15, 1.16.
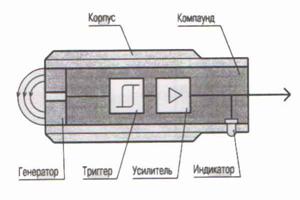
Рисунок 1.15 – Устройство индуктивного датчика
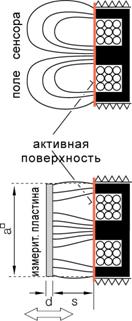
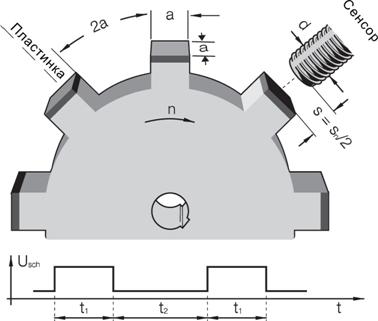
Рисунок 1.16 – Принцип индуктивного датчика
Генератор обеспечивает зону чувствительности выключателя. Триггер обеспечивает необходимую крутизну фронта сигнала переключения и значение гистерезиса. Усилитель увеличивает амплитуду выходного сигнала до необходимого значения. Светодиодный индикатор покзывает включенное/выключенное состояние выключателя, обеспечивает контроль работоспособности, оперативность настройки и ремонта оборудования. Компаунд обеспечивает необходимую степень защиты от проникновения твердых частиц и воды. Корпус обеспечивает монтаж выключателя, защищает от механических воздействий. Выполняется из латуни или полиамида, комплектуется метизными изделиями.
ШАГОВЫЕ ДВИГАТЕЛИ
Основные теоретические сведения
Шаговый двигатель – это электромеханическое устройство, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой.
Виды шаговых двигателей
Двигатели с переменным магнитным сопротивлением
Шаговые двигатели с переменным магнитным сопротивлением (рис. 2.1) имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала. Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имет шаг 30 град.
|
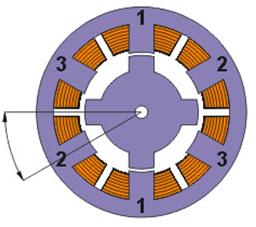
Рисунок 2.1 – Двигатель с переменным магнитным сопротивлением
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т. е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 2.2). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
|
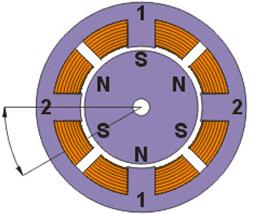
Рисунок 2.2 – Двигатель с постоянными магнитами
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).
Разрез реального шагового двигателя с постоянными магнитами показан на рис.2.3.
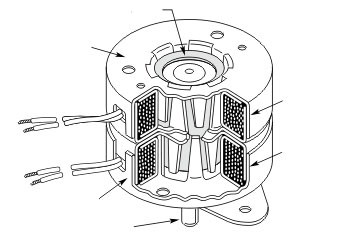

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
