


УДК 681.518.3
В. Н. ЧЕРНЫШОВ, В. В. МИШИН
V. N. CHERNYSHOV, V. V. MISHIN
ПРОГРАММное обеспечение ДЛЯ ДИАГНОСТИКИ подшипниковых узлов
THE SOFTWARE FOR DIAGNOSTIC OF BEARING UNITS
В работе представлено описание программного обеспечения, предназначенного для регистрации и комплексной обработки диагностической информации при реализации электрического метода диагностирования подшипника и подшипникового узла. Описана применяемая схема для анализа, систематизации измерительных данных и поиска устойчивых значимых корреляций между параметрами сигнала и характеристиками системы «подшипник – сборка – смазка – режимы и условия работы»
Ключевые слова: автоматизация процесса диагностики, диагностика подшипникового узла, распознавание образов
The paper describes software designed to record and comprehensive handling of diagnostic information in the implementation of the electric method ofdiagnostirova-bearing and bearing assembly. Described scheme is applied to the analysis of measurement data and action-resistant significant correlations between theparameters of the signal and the characteristics of "bearing-nickname - the assembly -lubrication - the modes and conditions of work"
Keywords: automate the process of diagnosis, diagnosis of bearing unit, data mining
ПОСТАНОВКА ЗАДАЧИ
Основной задачей комплексного диагностирования подшипникового узла является получение оценки фактического состояния системы «подшипник – сборка – смазка – режимы и условия работы» на соответствующем этапе ее формирования или эксплуатации [1]. В экспериментальных исследованиях [2] было показано, что активное электрическое сопротивление подшипника является диагностическим параметром, который дает достоверную информацию о техническом состоянии пары трения. Однако универсальных, простых и однозначных связей между параметрами сигнала и состоянием системы в целом не найдены. В процессе диагностики осуществляется интеграция неоднородных данных, которые имеет различную чувствительность к характеристикам системы. Задача диагностики подшипникового узла является многокритериальной и трудно формализуемой. Все это указывает на необходимость рассматривать ее в рамках теории распознавания образов. С опорой на имеющиеся математические модели делать акцент на обучении, в процессе которого автоматически выделяется действительная, эффективная, ранее неизвестная информация и использование ее для принятия квазиоптимального решения в конкретных условиях для определенной задачи.
Задачей проектирования является разработка программного продукта, с помощью которого возможно:
· централизованное управление аппаратными средствами диагностирования и получение измерительной информации в виде сигнала сопротивления узла;
· произвести теоретическое исследование диагностических математических моделей сопротивления узлов и подшипников качения в частности;
· обработка измерительных данных (интеграция методик обработки сигналов);
· обнаружить новые значимые корреляции, образы и тенденции в результате просеивания объема сохраненных измерительных данных (интеграция методик распознавания образов);
Для адаптации системы под конкретные задачи приложение должно иметь механизмы расширения функциональности.
ОПИСАНИЕ СТРУКТУРЫ ПРИЛОЖЕНИЯ
Исходя из поставленных задач, структура приложения имеет вид, представленный на рисунке 1. Источником измерительной информации служит прибор, построенный на основе микроконтроллера PIC18F4550. Управление осуществляется по протоколу USB 2.0, для чего в программе присутствует объект USB. Для обмена пакетами используется библиотека от MICROCHIP mpusbapi. dll. Максимальный размер пакета принятый в системе равен 64 байтам. По умолчанию в качестве типа передачи выбран bulk. Управление потоком осуществляется с использованием handshake пакетов.
|
|
|
Рисунок 1 – Объектная структура приложения |
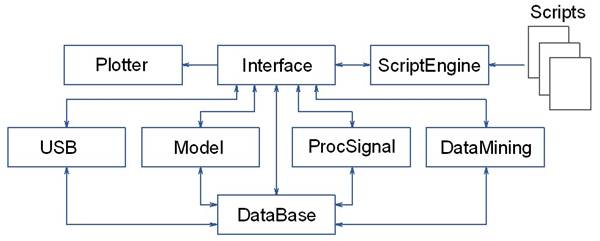
Для эффективной разработки принципов и алгоритмов комплексного диагностирования необходимы теоретические исследования зависимостей электрических величин от параметров системы. Для этой цели в структуре предусмотрен объект Model, позволяющий использовать существующие диагностические математические модели подшипников для построения частных регрессионных алгоритмов по оценки числовых характеристик дефектов.
Модели собраны в динамически подключаемые библиотеки, функциям моделирования в качестве входных данных передается объект класса InitialData, структура которого приведена на рисунке 2.
|
|
|
Рисунок 2 – Структура входных данных для диагностических математических моделей подшипников качения |
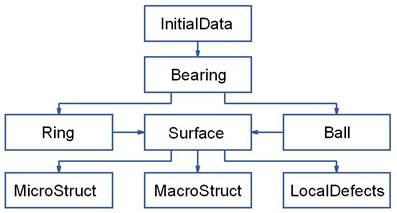
Данный объект содержит данные характеризующие условия работы (скорость вращения колец, радиальную нагрузку, длительность и дискретизацию сигнала) и объект класса Bearing. Класс Bearing содержит объекты классов Ring и Ball описывающие геометрию колец и тел качения, данные характеризующие свойства конструкционных материалов, а так же методы проверяющие условия сборки подшипника. Геометрия поверхности описывается тремя классами MacroStruct – макроотклонения, MicroStruct – микрогеометрия (шероховатость), LocalDefects – локальные дефекты. Для задания макроотклонения используется общепринятое уравнение зависимости Rпов от угловой координаты ![]() [1]:
[1]:
 ,
,
где Rпов0 – средний радиус сечения;
Qk , k – амплитуда и фазовый угол k-й гармоники отклонения;
k – номер гармоники (первая гармоника характеризует эксцентриситет, вторая – овальность, третья – трехвершинную огранку и т. п.);
p – предельный номер учитываемой гармоники.
Так как для описания профилей локальных дефектов (лунки, раковины, трещины и т. п.) используются различные виды и комбинации функций, они объявлены как виртуальные и возможно их переопределение. В частности в [1] предложены функции на базе полиномов Чебышева и Баттерворта.
Микрогеометрия контактирующих поверхностей описывается вероятностными законами распределения. Шероховатость задается в виде дифференциальной функции распределения высоты микронеровностей контактирующих поверхностей и задание параметров шероховатости каждой из контактирующих поверхностей.
Задача диагностирования решается в соответствии со схемой, представленной на рисунке 3.
|
|
|
Рисунок 3 – Схема диагностики подшипникового узла |
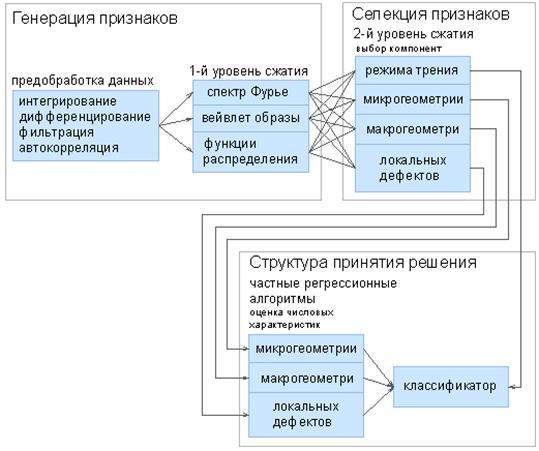
Задача генерации признаков разбивается на две составляющие. Первая состоит в предобработке данных для дальнейшего использования. Вторая состоит в сжатии объемов собираемой и хранимой информации для упрощения интерпретации.
Сигнал сопротивления имеет случайную составляющую, которая предположительно преимущественно несет информацию о параметрах шероховатости (микрогеометрии в зонах контактирования), поэтому при обработке ее следует выделить и описать с помощью интегральных и дифференциальных функций распределения. Обработка детерминированной и случайной составляющей производится отдельно друг от друга, для чего предусмотрены алгоритмы фильтрации и автокорреляции сигнала.
Наличие локальных дефектов предположительно вызывает локальные во времени изменения сигнала, поэтому целесообразно, совместно с преобразованием Фурье, использовать и вейвлет преобразование для выделения не стационарных особенностей. Они обеспечивает более благоприятную группировку точек, представляющих образы в новом пространстве.
Поскольку не все характеристики образа (соответствующие отдельным параметрам системы) в равной степени важны для определения класса, в разрабатываемом ПО необходим алгоритм селекции и упорядочения признаков, по которым будут оцениваться объекты. Этот алгоритм позволит понизить размерность пространства, установив оптимальный набор. При сопоставлении двух образов последовательным сравнением признаков изменениям с меньшей значимостью следует приписывать меньшие веса. Назначение весов признаков осуществляется посредством линейного преобразования. Для решения определенного класса задач в каждом образе (спектр Фурье, вейвлет образ, функция распределения) происходит отбор признаков характеризующих:
· макрогеометрию поверхности колец и типа посадки подшипников;
· макрогеометрию дорожек качения подшипников;
· микрогеометрию поверхности колец подшипников;
· микрогеометрию дорожек и тел качения подшипников;
· локальные дефекты дорожек качения подшипников;
· режим трения (сухое, полужидкостное, жидкостное).
По каждому набору признаков строятся частные решения задач регрессии, определяющие качественные и количественные параметры дефектов, режимов работы, а также вероятность (достоверность) их присутствия.
Полученные после регрессий данные поступают на классификатор, решающий поставленную в ходе диагностики задачу. На данном этапе используя интерфейс взаимодействия с набором функции класса DataMining и язык.
Используемые в программе алгоритмы DataMining приведены в таблице 1. Для их реализации использовалась кросс-платформенная библиотека численного анализа ALGLIB [5], распространяемая по лицензии GPL. Используя комбинацию этих алгоритмов можно создавать решения для задач диагностики по оценки фактического состояния системы «подшипник – сборка – смазка – режимы и условия работы» на основе обнаружения скрытых закономерностей в объемах данных.
Программа реализована на языке C++ с использованием компилятора gcc, для хранения данных применяется встраиваемая реляционная база данных SQLite. Для организации поддержки языка сценариев JavaScript используется модуль QtScript библиотеки Qt.
Таблица 1 - Классификация, регрессия, кластеризация, работа с данными
|
Алгоритм |
Описание |
|
1 |
2 |
|
k-means++ |
Вариант алгоритма k-means с улучшенным выбором стартового разбиения, ищет разбиение на кластеры, минимизирующее сумму квадратов внутрикластерных расстояний. |
|
Principal component analysis |
Метод главных компонент - это один из способов понижения размерности, состоящий в переходе к новому ортогональному базису, оси которого ориентированы по направлениям максимальной дисперсии набора входных данных. |
|
1 |
2 |
|
Linear discriminant analysis |
Линейный дискриминантный анализ (ЛДА) - это метод поиска линейной комбинации переменных, наилучшим образом разделяющей два или более класса. |
|
Decision forest |
Алгоритм является модификацией оригинального алгоритма Random Forest, сочетает в себе две идеи: использование комитета деревьев решений, получающего результат путем голосования, и идею рандомизации процесса обучения. |
|
Multinomial logit regression |
Логит-регрессия - это обобщение линейной регрессии для случая, когда зависимая переменная является номинальной. Логит-модель отображает вектор независимых переменных в вектор вероятностей отнесения зависимой переменной к одному из классов |
ВЫВОД
Разработанная программа дает возможность произвести теоретические исследования на математических моделях подшипниковых узлов и подшипников качения в частности. Программное обеспечение позволяет осуществить централизованное управление аппаратными средствами диагностирования. Позволяет осуществить переход от данных к информации необходимой для оценки фактического состояния системы «подшипник – сборка – смазка – режимы и условия работы».
В процессе разработки для решения задач использовались open source библиотеки: Qt [3], Boost [4], alglib [5]. Это позволяет использовать исходный код алгоритмов, структур данных, технологий, методик и интерфейсов с минимальными ограничениями.
Наличие модуля обработки сценариев javascript позволяет, без риска дестабилизации работы программы, расширить функциональность, автоматизировать диагностические алгоритмы и адаптировать систему под конкретные задачи.
СПИСОК ЛИТЕРАТУРЫ
1. Подмастерьев методы комплексного диагностирования опор качения. – М.: Машиностроение-1, 2001. – 376 с.
2.Марков подшипников качения по параметрам электрического сопротивления / , // Контроль. Диагностика, 2004. – № 9. – С. 35-41.
3.Кросс-платформенный инструментарий разработки ПО на языке программирования C++ [Электронный ресурс] / Режим доступа: http://qt. /
4.Собрание библиотек, расширяющих C++ [Электронный ресурс] / Режим доступа: http://www. boost. org/
5.Кросс-платформенная библиотека численного анализа [Электронный ресурс] / Режим доступа: http://www. /
|
ФГОУ ВПО «Госуниверситет – УНПК» Аспирант Тел. (48 E-mail: *****@***com |
ФГОУ ВПО «Госуниверситет – УНПК» к. т.н., доцент кафедры «Приборостроение, метрология и сертификация» Тел. (4862) E-mail: *****@***com *****@***ru |
