




Факультет автоматизации и информационных технологий
Кафедра Автоматики и Системотехники
«УТВЕРЖДАЮ»
Декан ФАИТ
д. т.н., профессор
_________________
Программа
Государственного экзамена по направлению
27.03.04 «Управление в технических системах»
Хабаровск 2016
Технические средства автоматизации и управления.
1. Датчики в системах автоматики, классификация и области применения. Функциональные схемы включения датчиков.
2. Электромагнитные реле. Назначение, классификация, основные параметры, характеристики и области применения.
3. Тахогенераторы.
Электромеханические системы.
4. Электрические двигатели. Классификация, основные параметры, характеристики и области применения.
5. Динамическая модель ДПТ-НВ.
6. Асинхронный двигатель.
7. Синхронный двигатель.
8. Выбор двигателя для производственного механизма.
Электроника, схемотехника
9. Операционные усилители: Основные параметры и характеристики и типовые применения (усилители, сумматоры, интегрирующие и диффереренцирующие устройства).
10. Полупроводниковые приборы: классификация, основные параметры, характеристики, и области применения основных видов приборов (диоды, биполярные транзисторы, полевые транзисторы, оптоэлектронные приборы).
11. Генераторы: классификация основные параметры и условия самовозбуждения. Особенности построения Нч и Вч генераторов.
12. Цифровые интегральные схемы: классификация, основные параметры и характеристики. Сравнительный анализ и области применения основных серий (ТТЛ/ТТЛШ, КМОП и ЭСЛ).
13. Комбинационные цифровые устройства: классификация и области применения (сумматоры, мультиплексоры, де мультиплексоры, дешифраторы, шифраторы, и преобразователи кодов).
14. Последовательностные цифровые устройства: классификация и области применения (тригеры, счетчики, регистры).
Теория автоматического управления
15. Виды систем автоматического управления и фундаментальные принциципы автоматического управления. Примеры.
16. Понятие передаточной функции системы. Структурные схемы. Правила эквивалентных преобразований структурных схем. Основные законы регулировки.
17. Типовая функциональная схема САУ. Переход от принципиальной к функциональной схеме. Пример.
18. Временные и частотные характеристики САУ. Пример качества регулирования.
19. Понятие устойчивости САУ. Математическое условие устойчивости.
20. Точность САУ. Пути повышения устойчивости в установившемся режиме.
21. Понятие инвариантности системы. Инвариантность ошибки задающему возмущающему воздействию. Способы достижения инвариантности.
22. Коррекция САУ (последовательная).
23. Метод гармоничных линеаризации. Методика определения комплексного коэффициента усиления нелинейных элементов.
24. Дискретное преобразование Лапласа. Понятие, определение, связь между дискретным и непрерывным преобразованиями Лапласа (Фурье).
Автоматизированные ИУС
25. Способы описания алгоритма работы ДЛСУ.
26. Промышленные коммуникационные сети. Назначение, параметры, топология, интерфейсы.
27. Обобщённая структура АСУ ТП. Функции. Классификация.
28. Языки программирования ПЛК.
29. Классификация ПЛК. Этапы выбора ПЛК для АСУ ТП.
Микроконтроллеры и микропроцессоры
30. Микропроцессоры в системах управления. Особенности архитектуры, классификация команд.
31. Интерфейсы вычислительных систем. Классификация, назначение и области применения. Стандарты на интерфейсы.
32. Организация ввода-вывода в микроЭВМ, порты ввода-вывода, особенности сопряжения с внешними устройствами.
33. Аппаратные и программные прерывания в МП.
34. Такты, машинные циклы МП, организация счета времени в МП.
35. Кэширование в микропроцессорах. Кэш прямого отображения и наборно-ассециативный.
36. Особенности архитектуры современных микропроцессоров.
Передача данных
37. Определение информации, сигналы, виды сигналов в устройствах передачи данных. Методы квантования и дискретизации сигналов.
38. Модуляция сигналов. Виды модуляции. Временное частотное представление модулированных сигналов.
39. Виды помех, искажение сигналов. Способы повышения достоверности передачи.
40. Синхронизация и синфазирование приемных и передающих устройств.
Математические основы теории систем
41. Отношения. Графы. Реляционная модель.
42. Логические функции, универсальная таблица истинности, задача минимизации.
43. Логический синтез комбинационных схем.
44. Логический синтез последовательных схем.
Вычислительные машины
45. Два типа архитектур ЭВМ. Гарвардская архитектура и архитектура Фон-Неймана. Отличительные особенности и области использования.
46. Форматы данных ЭВМ для чисел с фиксированной точкой (на примере INTEL). Знаковое и беззнаковое представление.
47. Двухшинная и трехшинная магистрали ЭВМ. Типовые диаграммы записи и чтения для двухшинной и трехшинной магистралей.
48. Применение N-разрядных сумматоров для реализации операций вычитания. Структурная схема вычитателя на базе сумматора.
49. Система прерываний ЭВМ. Назначение и функции контроллера прерываний.
50.Принципы организации и назначение стековой памяти.
Теория информации
51. Квантование сигналов по времени (критерии , ).
52.Квантование сигналов по уровню.
53.Спектры периодических и непериодических сигналов.
54.Кодирование. Код Грея.
55.Самокорректирующие коды.
56.Стационарные случайные процессы ( стационарность в узком и широком смыслах).
Моделирование систем
57. Для автоматической системы, модель которой представлена в виде структурной схемы (рис. 1), подобрать параметры модели регулятора (Transfer F cn) частотным методом в MATLAB – Simulink – Tools - linear analysis, с учетом следующих требований к качеству переходных процессов: время переходного процесса - tn![]()
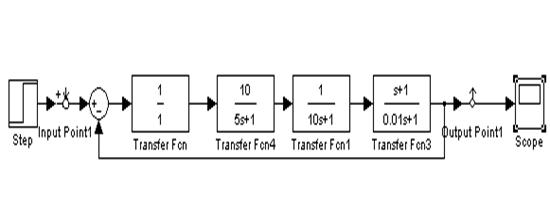
Рис. 1 . Структурная модель нескорректированной САУ
58. Для автоматической системы, модель которой представлена в виде структурной схемы (рис. 1), подобрать параметры модели регулятора (Transfer F cn) частотным методом в MATLAB – Simulink – Tools - linear analysis, с учетом следующих требований к качеству переходных процессов: время переходного процесса - tn![]()
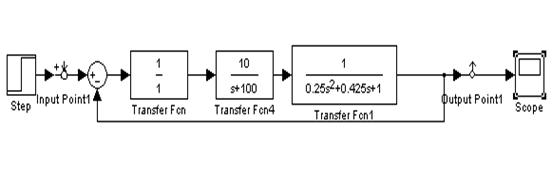
Рис. 1 . Структурная модель нескорректированной САУ
64. Для автоматической системы, модель которой представлена в виде структурной схемы (рис. 1), подобрать параметры модели регулятора (Transfer F cn) частотным методом в MATLAB – Simulink – Tools - linear analysis, с учетом следующих требований к качеству переходных процессов: время переходного процесса - tn![]()
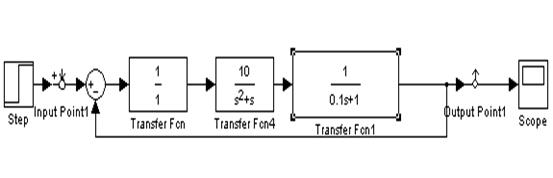
Рис. 1 . Структурная модель нескорректированной САУ
59. Для автоматической системы, модель которой представлена в виде структурной схемы (рис. 1), подобрать параметры модели регулятора (Transfer F cn) частотным методом в MATLAB – Simulink – Tools - linear analysis, с учетом следующих требований к качеству переходных процессов: время переходного процесса - tn![]()
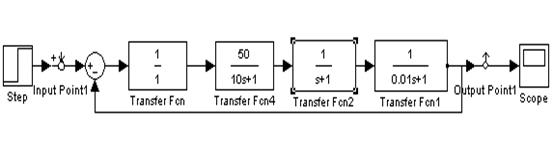
Рис. 1 . Структурная модель нескорректированной САУ
60. Для автоматической системы, модель которой представлена в виде структурной схемы (рис. 1), подобрать параметры модели регулятора (Transfer F cn) частотным методом в MATLAB – Simulink – Tools - linear analysis, с учетом следующих требований к качеству переходных процессов: время переходного процесса - tn![]()
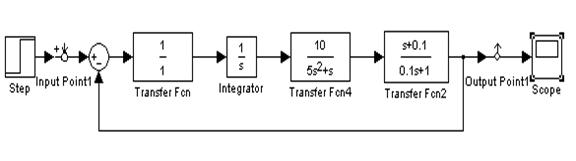
Рис. 1 . Структурная модель нескорректированной САУ
Мультимедиа технологии
61. Составные части мультимедиа: дисковод, звук, видеосистема, аппаратные средства и программное обеспечение.
62. Трехмерная графика и анимация: назначение, принципы создания и использование.
Системы управления базами данных
63. Поколения СУБД.
64.Этапы проектирования БД
65.Физическая организация данных.
66.Реляционная модель данных.
67.Связи отношений.
68.Операции реляционной алгебры.
69.Нормализация БД
70.Понятие и выполнение транзакций
71.Структурированный язык запросов SQL.
Утверждено на заседании кафедры «Автоматика и системотехника»
«16» мая 2016 г
Зав. кафедрой «АиС»
д. т.н., профессор Чье Ен Ун
