



На правах рукописи
ПЕТУХОВ Юрий Владимирович
ИНФОРМАЦИОННОЕ И МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ПОСТРОЕНИЯ БЕРЕГОВОЙ СЕТИ АВТОМАТИЗИРОВАННЫХ ИДЕНТИФИКАЦИОННЫХ СИСТЕМ ДЛЯ МОНИТОРИНГА И УПРАВЛЕНИЯ СУДОХОДСТВОМ НА ВНУТРЕННИХ ВОДНЫХ ПУТЯХ ЕГС ЕВРОПЕЙСКОЙ ЧАСТИ РОССИИ
Специальность 05.13.06
Автоматизация и управление
технологическими процессами и

производствами (технические системы)
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Санкт-Петербург
2008
Диссертация выполнена на кафедре технических средств судовождения и связи Санкт-Петербургского государственного университета водных коммуникаций
Научный руководитель:
доктор технических наук, профессор
Официальные оппоненты:
Заслуженный деятель науки РФ,
Доктор технических наук, профессор
Кандидат технических наук, доцент
Ведущая организация: компания «Ленинец»
Защита состоится “ 11 “ декабря 2008 г. в 14.00 часов на заседании диссертационного совета Д.223.009.03 Санкт-Петербургского государственного университета водных коммуникаций по адресу:
г. Санкт-Петербург, ул. Двинская, 5/7
С диссертацией можно ознакомиться в библиотеке Санкт-Петербургского государственного университета водных коммуникаций.
Автореферат разослан “ “ 2008 г
Ученый секретарь
диссертационного совета
кандидат технических наук,
доцент
1.ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность исследования. Необходимость повышения безопасности и эффективности транспортного процесса на внутренних водных путях (ВВП) России требует постоянного развития и совершенствования технических средств и систем, занятых в данном процессе. Кроме того, все более возрастает потребность в обмене информацией между сторонами, связанными с судоходством по внутренним водным путям, в частности, обмен информацией, связанной с безопасностью движения, информацией о грузо - и пассажиропотоках. Перед сектором внутреннего водного транспорта сейчас стоит задача связать структурные элементы транспортного процесса единой архитектурой, обеспечивающей определенную совместимость и эффективное взаимодействие.
Для решения такой задачи одной из наиболее перспективных и конструктивных в настоящее время является инфокоммуникационная технология, получившая название “Корпоративные речные информационные системы (КРИС)”. Отраслевой формой реализации этого класса информационных систем являются организационно-технические образования, получившие название “Речные информационные службы” (РИС)”. Cтруктурным ядром последних являются “Автоматизированные системы управления движением судов (АСУ ДС)”, которые, имеют в своем составе различные современные информационные системы телекоммуникаций и мониторинга: системы УКВ-радиосвязи, системы видеонаблюдения и радиолокационного контроля, информационно-диспетчерские службы, в ряде случаев речные региональные спасательно-координационные центры и др. При этом вся структура речной АСУ ДС, как правило, бывает погружена в радионавигационное поле ГЛОНАСС/GPS.
В последние 5-7 лет значительный интерес у всех специалистов водного транспорта для повышения безопасности и эффективности судоходства на ВВП вызывают возможности информационной технологии рубежа ХХ – ХХI веков, получившей название “Автоматизированная идентификационная система (АИС)”, ставшей уже неотъемлемой частью речных АСУ ДС. Возникновение технологии АИС можно поставить в один ряд с появлением на морском и речном транспорте радиолокационных станций или спутниковой навигации.
Вхождение АИС в состав АСУ ДС предполагает не только наличие на судах и у лоцманского корпуса соответствующих транспондеров, но и, прежде всего, оборудования берегового сегмента, состоящего, в первую очередь, из цепи береговых станций АИС, включающей базовые станции (БС), симплексные и дуплексные репитеры, а также сети передачи данных АИС в структурах АСУ ДС и РИС.
В связи с изложенным ЦЕЛЬЮ ДИССЕРТАЦИОННОЙ РАБОТЫ является новое решение актуальной научной задачи повышения эффективности мониторинга и управления транспортным процессом, а также обеспечения безопасности судоходства на основе использования АИС-информационных технологий при построении Речных информационных служб и АСУ ДС в корпоративной речной информационной системе на внутренних водных путях Единой глубоководной системы Европейской части России. Для достижения формулированной цели в работе поставлены, обоснованы, решены и ВЫНОСЯТСЯ НА ЗАЩИТУ СЛЕДУЮЩИЕ НАУЧНЫЕ РЕЗУЛЬТАТЫ:
Анализ мирового и отечественного опыта по современному уровню разработки и внедрения, перспективам развития метасистемы в иерархической триаде “КРИС-РИС-АСУ ДС(СУ ДС)” для внутренних водных путей.
1. Исследование предметной области в части алгоритмов функционирования и особенностей информационного обеспечения, структуры системы базовых станций в АИС как подсистеме речной АСУ ДС для различных регионов Европы и России.
2. Методика, модели и алгоритмы решения многопараметрических стохастических задач, оптимизирующих структуру зон действия базовых станций АИС.
3. Аналитические решения для определения оптимальных радиуса и зоны действия базовой станции АИС с учетом влияния на судовые транспондеры помех в информационных каналах, взаимного перемещения судов относительно базовых станций и заграждающего рельефа применительно к различным регионам ЕГС.
4. Концептуальная модель на системном (“организация – поведение”) и агрегативном (“структура – функции”) уровнях для построения береговой сети базовых станций АИС в различных наиболее важных регионах ВВП ЕГС Европейской части России и предложения по оптимизации в таких регионах топологической структуры сети базовых станций АИС.
МЕТОДОЛОГИЧЕСКОЙ ОСНОВОЙ ИССЛЕДОВАНИЙ являются методы системного анализа и управления технологическими процессами, теории случайных процессов и статистических решений, теории математического моделирования, экспертных оценок, статистической теории связи и методов моделирования на ЭВМ.
НАУЧНАЯ НОВИЗНА работы состоит:
1. В создании современного метода построения автоматизированных идентификационных систем как важнейших подсистем мониторинга и управления в иерархической триаде “КРИС-РИС-АСУ ДС”.
2. В выявлении моделей для описания закономерностей и разработке методики решения многопараметрических стохастических задач, оптимизирующих зоны и дальность действия базовых станций АИС с учетом одновременного воздействия помех в информационных каналах, влияния заграждающего рельефа между судовым транспондером и базовой станцией, а также перемещения транспондера относительно последней.
3. В синтезе алгоритмов для количественного анализа оптимальных и квазиоптимальных зон и дальности действия базовых станций АИС при одновременном воздействии флюктуационных и взаимных помех в информационных каналах, случайных влияниях заграждающего рельефа и перемещения судового транспондера относительно базовой станции.
4. В разработке предложений по оптимизации в различных регионах ЕГС Европейской части России топологической структуры сети базовых станций АИС.
ПРАКТИЧЕСКАЯ ЦЕННОСТЬ РАБОТЫ состоит в том, что созданы методика и инструментарий для разработки и внедрения на ВВП России высокоэффективной автоматизированной идентификационной системы мониторинга и управления, прежде всего для Единой глубоководной системы Европейской ее части.
Предлагаемый в работе комплекс моделей, алгоритмов и программ позволяет сформулировать рациональные, а в ряде случаев и близкие к оптимальным конструктивные решения по топологической структуре АИС как подсистемы речной АСУ ДС с учетом особенностей технологии построения и параметров конкретной судовой и береговой аппаратуры, физико-географических особенностей региона ВВП и различного вероятностного характера движения судов относительно базовых станций АИС.
РЕАЛИЗАЦИЯ НАУЧНЫХ РЕЗУЛЬТАТОВ. Отдельные положения диссертационной работы реализованы в утвержденных: Росморречфлоте, программы построения речных АСУ ДС и АИС в Санкт-Петербургском Государственном университете водных коммуникаций, в Государственных бассейновых управлениях “Волго-Балт”, “Волго-Дон”, “Камводпуть” и других региональных бассейновых управлениях ЕГС Европейской части России.
ПУБЛИКАЦИИ И АПРОБАЦИИ РАБОТЫ. По тематике диссертации опубликовано 13 научных статей, в том числе 2 статьи в изданиях, предусмотренных “Перечнем изданий ВАК”. Основные положения и результаты докладывались на трех международных Форумах “Связь на море и реке-2005, 2006, 2007, 2008”, на сессиях Дунайской межгосударственной комиссии по судоходству в 2006 – 2008 годах, на Всероссийской конференции по АИС и электронной картографии в 2006 г (г. Санкт-Петербург), на научных семинарах кафедры “Технических средств судовождения и связи” Санкт-Петербургского государственного университета водных коммуникаций в 2005 – 2008 годах.
ОБЪЕМ И СТРУКТУРА РАБОТЫ. Диссертация состоит из введения, четырех глав, заключения, списка опубликованных источников, содержащего 99 отечественных и зарубежных работ, включает в себя 114 страниц текста, 34 рисунка, 26 таблиц и графиков.
2. СОДЕРЖАНИЕ РАБОТЫ
В ПЕРВОЙ ГЛАВЕ проведен анализ и обобщение мирового и отечественного опыта по современному уровню разработки и внедрения, а также перспективам развития метасистемы в иерархической триаде “КРИС-РИС-АСУ ДС(СУДС)”, который свидетельствует о том, что системы управления движением судов получили в настоящее время весьма широкое распространение на внутренних водных путях Европы, Азии и Северной Америки. Можно утверждать, что они сейчас являются доминантой в указанной триаде и составляют неотъемлемую часть всемирного транспортного процесса и в особенности частью системы мониторинга, управления и безопасности внутреннего водного и смешанного “река-море” плавания судоходства. Несомненна актуальность внедрения таких систем на ВВП ЕГС Европейской части России.
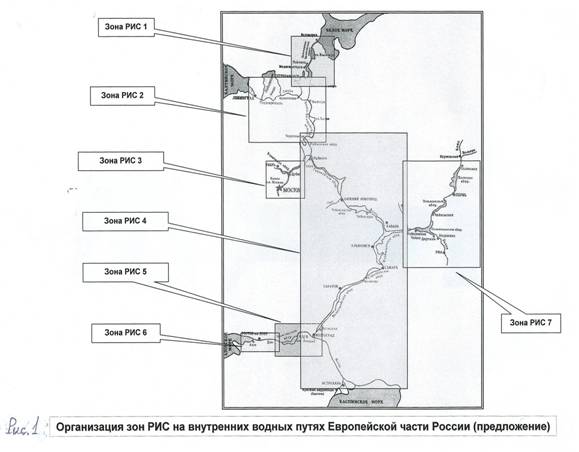
В главе предложен достаточно конструктивным вариант (Рис.1) cтруктуры КРИС на ЕГС, включающий 7 зон РИС и учитывающий не только особенности информационного функционирования и обеспечения последних, но и регионально-бассейновую административную структуру существующей системы управления судоходством на ЕГС, а именно:
- зона РИС1 – Зона Беломоро-Балтийского канала;
-зона РИС2 – Зона ГБУ “Волго-Балт”;
- зона РИС3 – Зона Москвы и Канала им. Москвы;
- зона РИС4 – Зона Большой Волги;
- зона РИС5 – Зона ГБУ “Волго-Дон”;
- зона РИС6 – Зона низовьев Дона и порта Азов;
-зона РИС7 – Зона ФГУ “Камводпуть”.
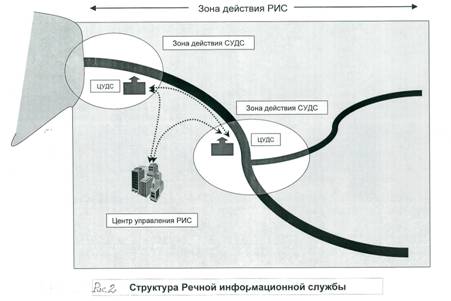
Подобная структуризация КРИС на ЕГС представляется более конструктивной с точки зрения ее реализации, причем каждая из указанных речных информационных служб может иметь типовую структуру, представленную на Рис.2, где обозначено ЦУДС – центр управления движением судов, а зоной действия РИС является формально ограниченная территория, где РИС официально объявлена действующей. Зона действия может охватывать конкретную акваторию, речной бассейн и т. д., в том числе трансграничный.
Установлено, что в свою очередь каждая из РИС может строиться на основе одной или нескольких систем управления движением судов, в том числе и автоматизированных.
|
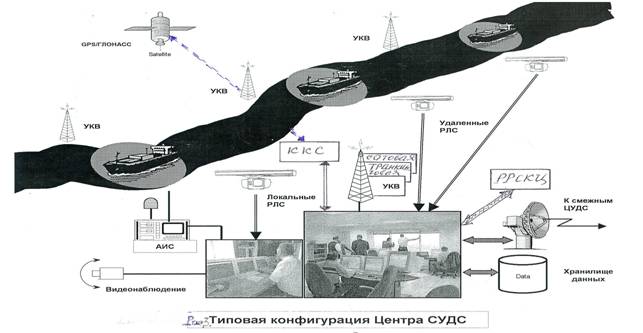
Эмпирически установившаяся к настоящему времени точка зрения о типовой конфигурации таких СУДС или АСУ ДС иллюстрируется Рис.3. Здесь дополнительно введены обозначения:
РРСКЦ – речной региональный спасательно-координационный центр, ККС – наземная контрольно-корректирующая станция, передающая на суда сигналы дифференциальных поправок для высокоточного местоопределения положения судов на ВВП.
|
Как видно из Рис.3 современная речная СУДС или АСУ ДС, в свою очередь, включает информационные подсистемы АИС, радиолокационного контроля, включающую локальные и удаленные РЛС, УКВ, видеонаблюдения, хранилища данных, центр СУДС.
Проведенный анализ канонической структурной схемы и особенностей ее информационного функционирования свидетельствует о необходимости сосредоточить, в первую очередь, внимание на задачах построения обеспечивающей высокую эффективность мониторинга и управления автоматизированной идентификационной системы АИС и ее топологической структуры в пределах КРИС ЕГС Европейской части России.
|
ВО ВТОРОЙ ГЛАВЕ проведен анализ информационного обеспечения и алгоритмов функционирования автоматизированных идентификационных систем речных АСУ ДС с учетом особенностей организации связи в них и основных технико-эксплуатационных параметров базовых станций и судовых транспондеров (Табл.1).
Наименование параметра | Значение параметра | |
Нижнее | Верхнее | |
Канал АИС 1 (87-й канал УКВ МПС) | 161,975 МГц | 161,975 МГц |
Канал АИС 2 (88-й канал УКВ МПС) | 162,025 МГц | 162,025 МГц |
Региональный канал АИС (рекомендация МСЭ) | 156,025 МГц | 162,025 МГц |
Разнос частот между каналами | 12,5 кГц | 25,0 кГц |
Полоса пропускания канала | 12,5 кГц | 25,0 кГц |
Выходная мощность передатчика | 2,0 Вт | 12,5 Вт |
Чувствительность приемника при полосе пропускания канала 12,5 кГц, дБм (не хуже) | 101 | 107 |
Чувствительность приемника при полосе пропускания канала 12,5 кГц, дБм (не хуже) | 92 | 98 |
Скорость передачи | 9600 бит/сек | 9600 бит/сек |
Модуляция | FM/GMSK (частотная модуляция /гауссова адаптивная манипуляция) |
При этом судовые станции АИС в зависимости от назначения и места установки подразделяется на следующие виды:
- Судовые станции класса А;
- Судовые станции класса В;
- Портативные (носимые) станции, используемые лоцманами на борту судна;
- Станции, устанавливаемые на средствах навигационного оборудования;
- Станции, устанавливаемые на воздушных судах, участвующих в поисково-спасательных операциях.
При работе АИС на ВВП основное направление передачи информации – “судно – берег”. В направлении берег – судно может передаваться текстовая информация, сигнал “запроса” и дифференциальные поправки ГНСС.
Особенностью использования технологии АИС на внутренних водных путях является доминирование мониторинга флота и диспетчерское управление движением.
Алгоритм функционирования АИС приведен на Рис.4. Здесь показан только сегмент “судно-берег”, для иллюстрации процесса мониторинга судов со стороны береговой службы. Судовой транспондер АИС принимает сигналы позиционирования от навигационного спутника, а также сигналы коррекции от станции диффпоправок.
На основе анализа в терминах современного инженерно-кибернетического подхода (обобщенных Sо-систем) cформулированы и выделены для последующего исследования в границах локальных РИС на этапе построения для них концептуальной модели сети АИС следующие характеристики:
- на системном уровне (“организация – поведение”) такой характеристикой является топологическая структура зон действия береговых базовых станций;
- применительно к агрегативному уровню (“структура – функции”) такой характеристикой является зона действия базовой станции, определенная с учетом технико-эксплуатационных параметров судового транспондера и БС, а также основных стохастических факторов на трассе “судно - базовая станция”.
|

В ТРЕТЬЕЙ ГЛАВЕ исследованы возможности математического обеспечения решения задачи оптимизации зон действия береговых базовых станций АИС, сформулированы и обоснованы следующие основные результаты.
Предложена методика и алгоритмы решения многопараметрических стохастических задач, оптимизирующих структуру зон действия БС АИС. Методика основана на, по-видимому, наиболее общем современном подходе, сформулированном в работах профессора и профессора и учитывающем вероятностную природу факторов, влияющих на верность передачи сообщений на трассе “судовой транспондер – базовая станция”:
- распространения УКВ радиоволн с учетом технико-эксплуатационных параметров приемо-передающих трактов аппаратуры;
- изменения влияния заграждающего рельефа между береговой базовой станцией и судовым транспондером;
- процесса перемещения судового транспондера относительно БС.
При передаче цифровых сообщений АИС в качестве анализируемого на экстремум соотношения целесообразно выбрать Perreq – эквивалентную вероятность ошибки в приеме той или иной кодовой комбинации такого сообщения в функции от Rc – среднего радиуса действия береговой (базовой) станции.
Тогда оптимальный радиус действия такой БС можно определить согласно алгоритма
| (1) |
где G(R) – область определения расстояний R между БС и судовым транспондером или приемоиндикатором.
В конкретных цифровых информационных каналах речных АСУ ДС дополнительное кодирование зачастую отсутствует.
Поэтому (1) преобразуется к виду
| (2) |
где Perr (R) – зависимость поэлементного приема цифрового сообщения от R.
Кроме того, обычно зависимость от Perr (R) имеет монотонный характер, в силу чего (2) естественно принимает форму
| (3) |
где
| (4) |
- требуемая вероятность ошибки поэлементного приема цифровой комбинации.
Вероятность поэлементного приема в (3) оценивается вероятностью ошибки, представляемой в форме
| (5) |
Аналитическое содержание входящих в (5) вероятностей определяется соответствующей используемой вероятностной моделью из Табл.2. Таблица 2
Модель/ Фактор | Информационный канал БС – “судовой приемник” | Заграждающий рельеф | Перемещение судового приемника относительно БС |
1 | Четырехпараметрическая модель | Модель нормального закона | Модель равномерного закона |
2 | Трехпараметрическая модель Бекмана | Модель равномерно заграждающего рельефа | Модель закона Релея |
3 | Двухпараметрическая модель Райса - Релея | Модель показательного закона | Модель закона Максвелла |
4 | Однопараметрическая модель Релея | ||
5 | Модель канала с постоянными параметрами |
Далее в (5) ρ (h2) – вероятность ошибки в канале с постоянными параметрами (µ=соnst); µ - амплитудный коэффициент передачи полезного сигнала.
| (6) |
Здесь Pc – мощность принимаемого полезного сигнала в канале только с флюктуационным шумом; Т – длительность элементарной посылки (“1” или “0”); v2 – спектральная плотность флюктуационного шума. Наконец, W (µ) – определяется каким-либо из соотношений для µ cогласно Таблицы 2. W(R) и W(H) – плотности вероятности, соответственно, случайного перемещения судового транспондера (приемоиндикатора) относительно БС и влияния заграждающего рельефа на линии БС – СТ, определяемые также соотношениями согласно моделей Таблицы 2. G(µ) и G(H) – области интегрирования, определяемые амплитудным коэффициентом µ и высотой заграждающего рельефа H.
Соотношение (3) в сочетании с (5) представляет собой общий алгоритм оптимизации топологической структуры цифровой информационной системы АИС. Для информационного канала “судовой транспондер (приемник) – базовая станция” исследованы возможности всех пяти моделей: четырехпараметрической, Бекмана, Релея – Райса, Релея и модели канала с постоянными параметрами. Для условий АИС обоснован выбор последних двух, когда для коэффициента передачи информационного канала релеевская плотность вероятности равна
| (7) |
а при отсутствии случайных изменений квадратурных компонент сигнала, когда
| (8) |
W (µ) превращается в дельта – функцию при
µ= µρ |
что соответствует весьма типичному случаю канала с постоянными параметрами.
Влияние заграждающего рельефа исследовано для трех моделей: нормального закона ( в том числе усеченного), показательного закона и равномерно заграждающего рельефа. Применительно к регионам РИС Волго-Балта и Волго-Дона наиболее характерны два первых их них, когда плотности вероятности высот равны, соответственно:
| (9) |
где mh и σh2 – cреднее значение и дисперсия рельефа трассы между корреспондентами.
| (10) |
где α = 0,01 ÷0,1 – параметр распределения высот.
Наконец, влияние перемещения судового транспондера относительно базовой станции АИС предложено отразить равномерным, релеевским и максвеловским законами плотности вероятности взаимных расстояний. Последние два из них наиболее характерны для РИС на ЕГС Европейской части России. При этом их плотности вероятности W( R ), соответственно, равны
| (11) |
| (12) |
| (13) |
| (14) |
Причем Rср – среднее значение R.
В ЧЕТВЕРТОЙ ГЛАВЕ выполнены расчеты и исследования по оптимизации топологии построения береговой сети базовых станций АИС на внутренних водных путях ЕГС Европейской части России.
Здесь, прежде всего, даны аналитические решения для оптимальных радиуса и зоны действия базовой станции АИС с учетом влияния на судовые транспондеры помех в информационных каналах, взаимного перемещения судов относительно базовых станций и заграждающего рельефа. В этой части получены решения:
1. Для потенциально достижимых зон действия базовых станций в информационных каналах только с флюктуационным шумом и без замираний, либо релеевскими замираниями. В первом случае выражения для полной вероятности ошибки поэлементного приема цифровых сообщений имеет вид
| (15) |
где | (16) |
- параметр канала радиосвязи, определяющий его потенциальные возможности без учета случайного расстояния между корреспондентами, Рш – мощность шумов в информационной полосе частот на выходе линейной части приемника.
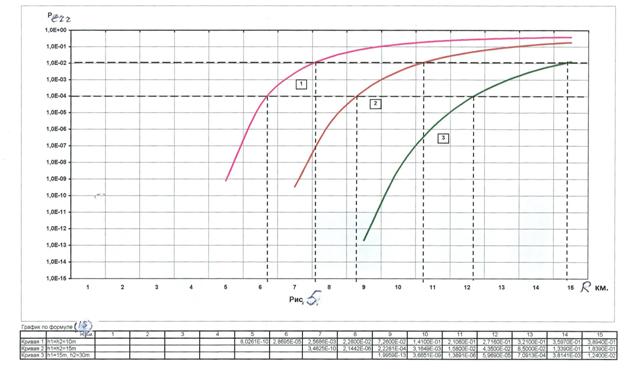
Для (15) возможны два способа решения в (3) – графо-аналитический и аналитический. При графо-аналитическом решении по выражению для вероятности ошибки строится соответствующая кривая Perr ( R ), а затем на требуемом уровне Pred проводится горизонталь, точка пересечения которой с кривой и определяет величину Rcopt. Для иллюстрации этого на Рис.5 по (15) построены зависимости вероятности ошибки Perr от R [км]:

Для Pred = 10-4 получим:

2. Для случайных перемещений судовых транспондеров относительно БС, имеющих одномерную плотность по закону Максвелла, что характерно для Волго-Балта, и по закону Релея, что более свойственно транспортному процессу в регионе Большой Волги и Волго-Дона, а также для модели с равномерным законом плотности вероятности, описывающей наиболее неопределенную ситуацию.
|
При максвелловском законе получено:
| (17) |

Для численного интегрирования качестве примера были приняты следующие значения параметров радиолинии:

При двух вариантах
Pпр. мин. = 1·10-12 Вт и 2,5·10-12 Вт | (18) |
При этом в (16) необходимо подставить вместо Pш величину Pпр. мин. =1·10-12. Тогда для Preg ≤ 10-4 получаем Rcopt ≈ 12,4 км и Rcopt ≈ 10,15 км, соответственно.
Для распределения расстояний судно БС по Закону Релея имеет место
| (19) |
Результаты численного интегрирования по (19) для указанных выше условий свидетельствует о том, что при использовании Закона Релея длительность действия БС на 14 % в среднем меньше, чем при использовании закона Максвелла.
Наконец, для наиболее “неопределенной” вероятностной ситуации перемещения судовых транспондеров относительно БС можно воспользоваться равномерной моделью плотности вероятности для W ( R ). Тогда
| (20) |

Нахождение ![]() согласно, по-видимому, наиболее просто на основе использования ПК и графо-аналитического решения так, как это проводилось ранее.
согласно, по-видимому, наиболее просто на основе использования ПК и графо-аналитического решения так, как это проводилось ранее.
В ряде случаев может оказаться полезным при этом и такое представление (20)
| (21) |

В этом выражении всегда можно ограничиться конечным числом слагаемых знакопеременного ряда, причем ошибка не превышает по абсолютной величине первого из отброшенных членов.
3. Для заграждающего рельефа в виде детерминированных преград заданной высоты, а также вероятностным характером преград с экспоненциальной плотностью вероятности, что весьма характерно для регионов Волго-Балта, Москвы, в известной мере – Волго – Дона.
В первом случае для вероятности ошибки в (3) получено
| (22) |
где  - параметр, характеризующий форму препятствий, Ко = R1/RC – отношение расстояний до препятствия и между корреспондентами, bэ – радиус сферы, аппроксимирующей реальное препятствие. Тогда в (3) для любых Preg [10-2÷10-4] имеет место существенное снижение радиуса зоны базовой станции АИС.
- параметр, характеризующий форму препятствий, Ко = R1/RC – отношение расстояний до препятствия и между корреспондентами, bэ – радиус сферы, аппроксимирующей реальное препятствие. Тогда в (3) для любых Preg [10-2÷10-4] имеет место существенное снижение радиуса зоны базовой станции АИС.
Например, преграды высотой 40 м посреди трассы (Ко = 0,5) cнижает ![]() до 10,3 км. Приближение преграды к передатчику (Ко=0,25) уменьшает
до 10,3 км. Приближение преграды к передатчику (Ко=0,25) уменьшает ![]() до 9,4 км.
до 9,4 км.
Для вероятностных характеристик преград найдено следующее выражение вероятности ошибки в (3):
| (23) |
где α из (10), а σ2 – из (12).
На Рис.6 по (23) построены зависимости Perr = Perr (Rc) при значении энергетического параметра К = 105, Ко = 0,5 для средних высот рельефа 20м (кривая 1), 50м (кривая 2) и 100м(кривая 3).
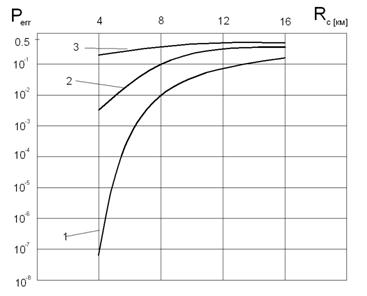
Рис. 6
Как видно из Рис.6 средние высоты рельефа самым существенным образом влияют на возможность решения уравнения оптимизации (3).
Так для высот 20 м и 50 м и Preg = 10-2 такое решение существует, оно составляет Rcopt ≈ 8 км и 4 км, соответственно, а для Preg = 10-4 и Н=20м,  Для высот рельефа 50 м и более такое решение отсутствует.
Для высот рельефа 50 м и более такое решение отсутствует.
4.Для дальности и зон действия базовых станций в условиях взаимных помех средств АИС и УКВ радиосвязи при немодулированном и модулированном характере таких помех.
Здесь получены в том числе аналитические решения (3) в форме
| (24) |
для незамирающего цифрового сигнала и замирающей взаимной помехи и
| (25) |
для замирающих сигнала и помехи, χп – энергетический параметр помехи, ![]() - коэффициент взаимного различия частотно-временной структуры сигнала и помехи, Rп – расстояние между БС и источником помех.
- коэффициент взаимного различия частотно-временной структуры сигнала и помехи, Rп – расстояние между БС и источником помех.
Соотношения (24) и (25) являются весьма общими и позволяют анализировать влияние на Rcopt различных классов взаимных помех, в том числе таких, как различного рода побочные излучения, взаимные помехи одновременно работающих радиосредств, преднамеренные помехи, включая ретранслированные. Например, для взаимной помехи ЧМ передаче типа моногармонического излучения имеем
| (26) |
а для взаимной помехи ЧМ передаче от ЧМ передачи получаем:
| (27) |
Здесь τ – момент манипуляции взаимной помехи, ![]()
Соотношение (26) представляет величину ![]() и для случая воздействия на ЧМ передачу ретранслированной помехи, расстроенной относительно подавляемых сигналов по несущей частоте на величину ׀Ωr׀, а соотношение (27) – ретранслированной помехи, расстроенной как по несущей частоте на величину ׀Ωr׀, так и по тактовой частоте (времени) на величину τ. При
и для случая воздействия на ЧМ передачу ретранслированной помехи, расстроенной относительно подавляемых сигналов по несущей частоте на величину ׀Ωr׀, а соотношение (27) – ретранслированной помехи, расстроенной как по несущей частоте на величину ׀Ωr׀, так и по тактовой частоте (времени) на величину τ. При ![]() из (27) следует (26).
из (27) следует (26).
5. Исследованы зависимости оптимального и квазиоптимальных радиусов зон БС АИС от основных параметров информационного канала на трассе “судовой транспондер – базовая станция” и взаимных помех для указанных в п.1 – 4 решений. В качестве технико-эксплуатационных параметров информационного канала рассмотрены: мощность передатчика судового транспондера, чувствительность приемника БС, высоты подъема антенн БС и транспондера; для взаимных помех рассмотрены: показатель энергетической эффективности взаимной помехи в точке приема, коэффициент взаимного различия частотно-временной структуры сигналов АИС и помех, расстояния между БС и источниками помех
6. Разработана концептуальная модель на системном (“организация – поведение”) и агрегативном (“структура – функции”) уровнях для построения береговой сети базовых станций АИС в различных, наиболее важных регионах ВВП ЕГС Европейской части России: для ГБУ “Волго-Балт” (зона РИС2), Московского района (зона РИС3) и ГБУ “Волго-Дон”. Сформулированы предложения по оптимизации в этих регионах и их речных информационных службах топологической структуры сети базовых станций АИС.
Сформулированы также предложения по возможной топологической структуре базовых станций, для остальных регионов (зоны РИС1, РИС4, РИС6 и РИС7).
Концепция развертывания сегментов АИС на ВВП ЕГС должна предусматривать, во-первых, дифференциацию применительно к отдельным регионам, входящим в состав речных информационных служб, показанных на Рис.1. Во-вторых, развертывание следует осуществлять поэтапно.
Содержанием первого этапа целесообразно составить создание сегментов береговых базовых станций АИС в наиболее технологически оснащенных, в том числе и АИС – технологиями, РИС:
- РИС2 – сегмент Волго-Балта;
- РИС5 – сегмент Волго-Дона;
- РИС3 – сегмент Московский и канала имени Москвы.
На втором этапе развертывание сегментов АИС целесообразно провести в
- РИС1 – сегмент Беломоро-Балтийского канала;
- РИС4 – сегмент Большой Волги;
- РИС6 – сегмент низовьев Дона и порта АЗОВ;
- РИС7 – сегмент ФГУ “Камводпуть”
В работе представлены концентрировано предложения по каждому из этапов.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
Настоящая диссертационная работа посвящена новому решению актуальной научной задачи повышения эффективности мониторинга и управления транспортным процессом, а также обеспечения безопасности судоходства на основе использования АИС – инфокоммуникационных технологий при построении Речных Информационных Служб и АСУ ДС в Корпоративной речной информационной системе на внутренних водных путях Единой глубоководной системы Европейской части России. На основе теоретических исследований поставленных задач, системного анализа, аналитических расчетов, моделирования и экспериментальных данных получены следующие новые научные результаты.
1. Проведены аналитический обзор и обобщение современного мирового и отечественного опыта построения и информационного обеспечения в иерархической триаде “Корпоративная речная информационная система – Речная Информационная служба – АСУ ДС (СУДС)” для реализации КРИС на ЕГС Европейской части России. На основании структурно-логического синтеза предложен достаточно конструктивный вариант структуры такой КРИС, включающий 7 зон РИС, учитывающий не только особенности информационного функционирования, но и регионально-бассейновую структуру существующей системы управления судоходством на ЕГС.
2. Выполнены анализ и обобщение накопленного в Европе и России опыта построения сети береговых базовых станций Автоматизированной Идентификационной Системы, особенностей информационного обеспечения и алгоритмов функционирования такой системы для мониторинга и управления движением судов, что позволило сформулировать и выделить в терминах современного инженерно-кибернетического подхода в границах локальных РИС (на этапе построения для них концептуальной модели сети АИС) следующие характеристики:
- на системном уровне (“организация – поведение”) – топологическую структуру зон действия базовых станций АИС;
- на агрегативном уровне (“структура – функции”) – дальность и зону действия базовой станции.
3. Cформулированы и предложены методика и алгоритмы решения многопараметрических стохастических задач, оптимизирующих дальность и структуру зон действия АИС, базирующиеся на, по-видимому, наиболее общей современной модели , , учитывающей вероятностную природу трех основных факторов, влияющих на верность передачи сообщений на трассе “судовой транспондер – базовая станция”:|
- распространения УКВ радиоволн с учетом технико-эксплуатационных параметров приемо-передающих трактов аппаратуры;
- изменения влияния заграждающего рельефа между береговой базовой станцией и судовым транспондером;
- процесса перемещения судового транспондера относительно БС.
4.Получены аналитические решения такой задачи при передаче цифровой информации в каналах АИС:
Для потенциально достижимых зон действия базовых станций в каналах только с флюктуационным шумом и без замираний либо релеевскими замираниями.
Для заграждающего рельефа в виде детерминированных преград, а также вероятностного характера преград с экспоненциальной плотностью вероятности, что весьма характерно для РИС в регионах Волго-Балта, канала им. Москвы, в известной мере – Волго-Дона.
Для случайных перемещений судовых транспондеров относительно БС, описываемых одномерными плотностями по закону Максвелла, что характерно для Волго-Балта и других районов Северо – Запада России, и по закону Релея, более свойственному в регионах Большой Волги.
Для условий взаимных помех средств АИС и УКВ радиосвязи в диапазоне 156 – 162 мГц и комплексном воздействии факторов п.3.
5. Проведено исследование влияния на размеры зоны и дальности действия БС АИС от параметров радиоканала и основных эксплуатационно-технических характеристик стандартных радиосредств АИС. Показано, что потенциально достижимые значения радиусов действия береговых станций АИС при Preg ≤ 10-4 без учет влияния рельефа и внешних помех лежат в пределах от 9 км до 22 км.
Влияние взаимных помех определяется показателем энергетической эффективности такой помехи, коэффициентом взаимного различия частотно-временной структуры сигналов АИС и помех, расстояниями между БС и источниками помех.
Помеха, сопоставимая по энергии с полезным сигналом, ![]() ≤ 0,4 при удалении от БС на 1 км и Preg ≤ 10-4 может снизить потенциальный радиус на порядок.
≤ 0,4 при удалении от БС на 1 км и Preg ≤ 10-4 может снизить потенциальный радиус на порядок.
Наличие релеевских замираний в информационном канале для Preg ≤ 10-3 уменьшает дальность действия в 3 раза, а при Preg ≤ 10-4 – в 5 раз и является весьма нежелательным явлением на радиотрассе.
6. Разработана концептуальная модель на системном (“организация –
поведение”) и агрегативном (“структура – функции”) уровнях для построения береговой сети базовых станций АИС, в первую очередь, для наиболее важных по интенсивности в транспортном процессе регионов ЕГС: ГБУ “Волго-Балт” (зона РИС2), района канала им. Москвы (зона РИС3) и ГБУ “Волго-Дон” (зона РИС5). Cформулированы предложения по оптимизации в этих РИС топологической структуры сети базовых станций АИС и для остальных регионов ЕГС (зоны РИС1, РИС4, РИС6 и РИС7).
ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ
В изданиях, предусмотренных “Перечнем изданий ВАК”:
1. . «Особенности использования транкинговой связи в корпоративных речных информационных системах», ж. «Речной транспорт», №г. , Моск. обл. , 60-62 с.
2. , «Электромагнитная защищенность базовых станций речных АИС в условиях взаимных помех», ж. «Проблемы информационной безопасности. Компьютерные системы», вып. 2, СПБ, Политехника, 2008 г., 0,4 п. л.
В других изданиях:
1. , , Сикарев. А.А, “Сравнительный анализ моделей законов Максвелла и Релея при расчете зон действия речных АИС в условиях вариации высот заграждающего рельефа”, Международный межвузовский сборник научных трудов “ТСС и С на морских и ВВП”, вып.7, СПб, Судостроение, 2006, с.95-98. (издание ВАК)
2. , , “Особенности использования модели закона Максвелла при расчете дальности и зон действия речных АИС”, Международный межвузовский сборник научных трудов “ТСС и С на морских и ВВП”, вып.7, СПб, Судостроение, 2006, с.8. (издание ВАК)
3. , “Зависимость оптимального радиуса зоны береговой станции АИС от основных параметров радиоканала и взаимных помех”, Международный межвузовский Сборник научных трудов “ТСС и С на морских и ВВП”, вып.7, СПб, Судостроение, 2006, с.117 – 122. (издание ВАК)
4. , , “Особенности использования модели закона Максвелла при расчете дальности и зон действия речных АИС”, “Информост. Радиоэлектроника и телекоммуникации”, вып.4 (46), М., 2006, с.8-10.
5. , , “Переходить или не переходить на частоту мысли”, “Информост. Радиоэлектроника и телекоммуникации”, вып.1 (43), М., 2006, с.17-21.
6. , Стойлик система электросвязи внутреннего водного транспорта. – Информационное издание “ВКСС. Коннект”, вып.6, М., 2006, с.33 – 41.
7. , Пономаренко и функционирование в РФ ГМССБ. – “Информост” - №2(44), М., 2006, с.15 – 17.
8. , Стойлик обеспечение функционирования Комплексной системы электросвязи ВВТ. Состояние и направления совершенствования. – “Специальный каталог – справочник. “Связь, навигация, безопасность на море и реке”. – “Информост”, М., 2005, с.
9. Петухов система электросвязи внутреннего водного транспорта. – Информационное издание “ВКСС. Коннект. Мир связи”, вып.3, М., 2007, с.
10. Петухов направления развития систем мониторинга судов на ВВП, ж. Мобильные телекоммуникации, №5 М. 2008, 22-26 –с.
11. , , Современные сетевые технологии в телекоммуникационных системах, Под общей редакцией проф. , монография. Санкт-петербург, 2008, 475 с.
